在线最优化
Truncated Gradient
L1正则化法
L1正则化
- $\lambda$:正则化项参数
- $sgn$:符号函数
- $g^{(t)}=\nabla_w L(w^{(t)}, Z^{(t)})$:损失函数对参数梯度
- L1正则化项在0处不可导,每次迭代使用次梯度计算正则项梯度
- OGD中每次根据观测到的一个样本进行权重更新 (所以后面正则项次梯度只考虑非0处???)
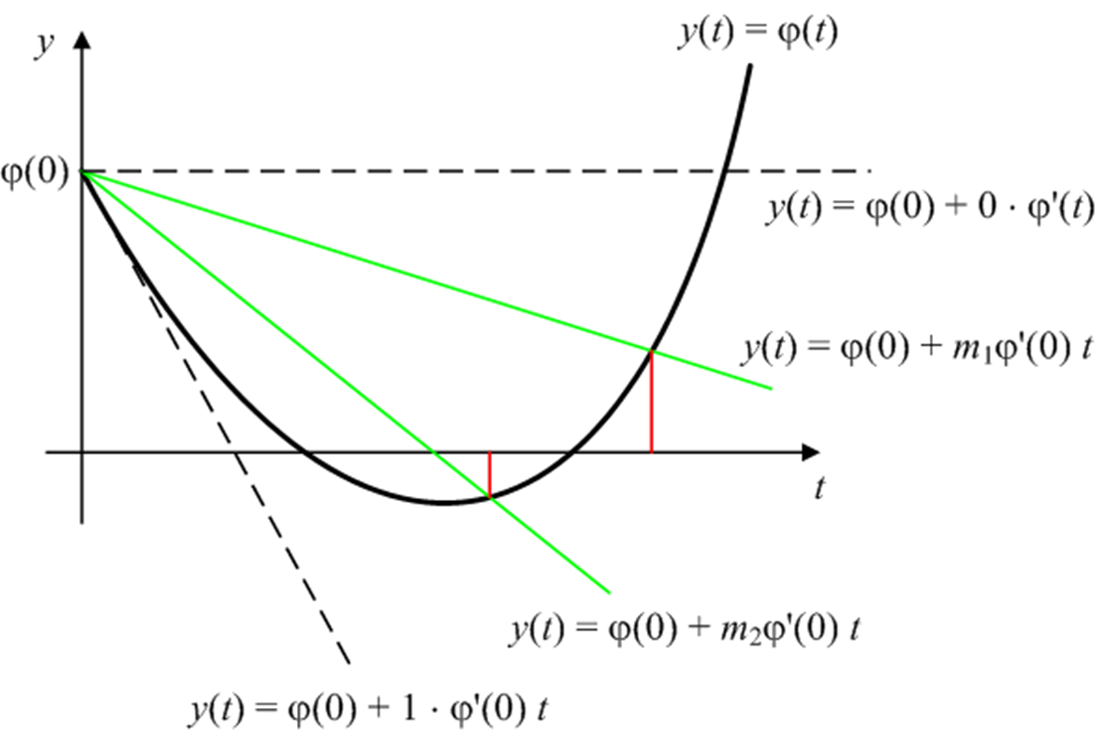
简单截断法
简单截断法:以$k$为窗口,当$t/k$非整数时,使用标准SGD迭代, 否则如下更新权重
- $w^{(t)}$:模型参数
- $g^{(t)}$:损失函数对模型参数梯度
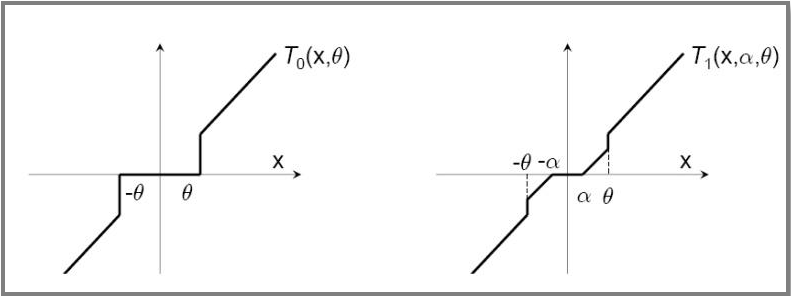
- $T_0$:截断函数
- $\theta$:控制参数稀疏性
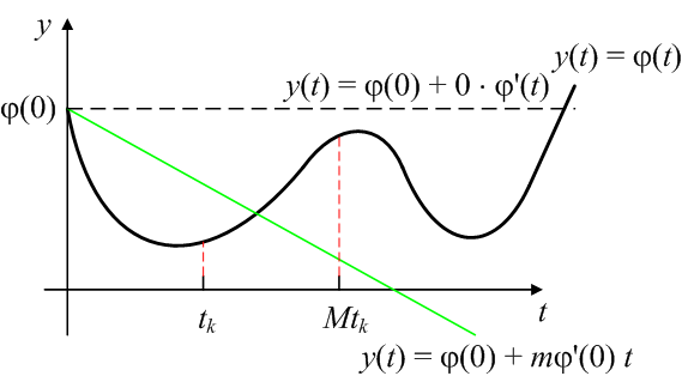
截断梯度法
截断梯度法:以$k$为窗口,当$t/k$非整数时,使用标准SGD迭代, 否则如下更新权重
- $\lambda, \theta$:控制参数$w$稀疏性
对简单截断的改进,避免在实际(OgD)中参数因训练不足过小 而被错误截断,造成特征丢失
Forward-Backward Spliting
FOBOS:前向后向切分,权重更新方式为proximal method如下
L1-FOBOS
L1-FOBOS:即令$Phi(w)=\lambda |w|_1$,则根据可加性如下
- $V=[v_1, v_2, \cdots, v_N]:=w^{(t.5)}$:为方便
- $\tilde \lambda := \eta^{t.5} \lambda$:为方便
- $\eta^{t.5}$:学习率,常取 $\eta^{(t)} \in \theta(\frac 1 {\sqrt t})$
则对$w_i$求次梯度、分类讨论,解得
可以理解为:到当前样本为止,维度权重小于阈值 $\eta^{(t.5)} \lambda$)时,认为该维度不够重要, 权重置为0
可视为$k=1, \theta=\infty$的Tg算法
另外,显然有$w_i^{(t+1)} v_i \geq 0$
- 考虑$w_i^{(t+1)}$使得目标函数最小,带入$w=0$则得
Regularized Dual Averaging
RDA算法:正则对偶平均算法,权重更新方式为 包含[增广]正则项的最速下降
目标函数包括三个部分
- $\frac 1 t \sum_{r=1}^t g^{(r)} w$:包含之前所有梯度 均值
- $\Phi(w)$:正则项
- $\frac {\beta^{(t)}} t h(w)$:额外正则项,严格凸,且 不影响稀疏性
相较于TG、FOBOS是从另一方面求解在线最优化,更有效地提升 特征权重稀疏性
L1 RDA
L1 RDA:令$\Phi(w) := \lambda |w|_1$, 再设$h(w) := |w|_2^2$,根据可加性则有
- $\lambda > 0, \gamma > 0$
- $\bar gi^{(t)} = \frac 1 t \sum{r=1}^t g_i^{(r)}$
对$w_i$求次梯度、置零、求解得
- 可以理解为:某维度梯度累计均值绝对值$|bar g_i^{(t)}$ 小于阈值$\lambda$时,对应权重被置零、产生稀疏性
相较于L1-FOBOS的截断
- 截断阈值为常数,更加激进、容易产生稀疏性
- 截断判断对象为梯度累加均值,避免由于训练不足而产生 截断
- 只需条件$\lambda$参数,容易权衡精度、稀疏性
Follow the Regularized Leader
FTRL:综合考虑L1-RDA、L1-FOBOS
L1-FOBOS、L1-RDA变换
将L1-FOBOS类似近端算法收敛证明中展开、去除无关项、放缩, 得到类似L1-RDA目标函数
将L1-RDA目标函数整体整体放缩,得到
- $g^{(1:t)} := \sum_{r=1}^t g^{(r)}$
FTRL综合考虑L1-FOBOS、L1-RDA,得到目标函数
- 使用累加梯度更新,避免因训练不充分错误截断
- 包含L1-FOBOS、L1-RDA全部正则化项
求解
将FTRL中最后一项拆分、去除无关项
则同样根据可加性,对各分量求次梯度、置零、求解得
其中学习率$\eta$为类似Adagrad优化器的学习率,但包括可学习 参数$\alpha, \beta$