PreOrder(T): s = InitStack() cur = T while s.not_empty() or cur: while cur: visit(cur) s.push_back(cur) cur = cur.left cur = s.pop() cur = cur.right
// 等价写法,仅使用`if`利用外层循环 PreOrder(T): s = InitStack() cur = T while s.not_empty() or cur: if cur: visit(cur) s.push_back(cur) cur = cur.left else: cur = s.pop() cur = cur.right
基于对遍历性质的考虑
扩展性较好,可以扩展到中序、后序遍历
广度优先入栈:同层右、左节点先后入栈
1 2 3 4 5 6 7 8 9 10
PreOrder(T): s = InitStack() s.push_back(T) while s.not_empty(): cur = s.pop() if cur.right: s.push_back(cur.right) if cur.left: s.push_back(cur.left) visit(cur)
InOrder(T): s = InitStack() cur = T while s.not_empty() or cur: while cur: s.push_back(cur) cur = cur.left cur = s.pop() visit(cur) cur = cur.right
// 等价写法,仅使用`if`利用外层循环 InOrder(T): s = InitStack() cur = T while s.not_empty() or cur: if cur: s.push_back(cur) cur = cur.left else: cur = s.pop() visit(cur) cur = cur.right
后序:需要标记当前节点左、右子树是否被访问
深度优先入栈
节点先入栈后访问,栈内存未访问节点
记录最后一次访问节点,判断右子树是否被访问
(若右子树被访问,右子节点必然是上个被访问节点)
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17
PostOrder(T): s = InitStack() cur = T last = NULL while s.not_empty() or cur: while cur: s.push_back(cur) cur = cur.left cur = s.top() // 检查右子树是否被访问过 if cur.right == NULLor cur.right == last: visit(cur) last = s.pop() // 此时再弹出`cur` cur = NULL// 置`cur`为`NULL`,否则 // 再次访问左子树,死循环 else: cur = cur.right
# 判断节点是否存在、再填充至队列 LevelTraversal(T): q = InitQueue() cur = T while q.not_empty() or cur: if cur.left: q.push_back(cur.left) if cur.right:d q.push_back(cur.right) visit(cur) cur = q.pop_first()
# 先填充、再判断节点是否为`None` # 填充可保证、适合节点位置和满二叉树对应 LevelTraversal(T): q = InitQueue() q.push(T) # 层次遍历使用队列实现,所以无需像栈一样使用 # 两个判断条件`q.not_empty or cur` while q.not_empty(): cur = q.pop_first() # 弹出时判断节点是否有效 if cur: visit(cur) q.push_back(cur.left) q.push_back(cur.right)
严格分层遍历:记录队列长度、遍历固定长度
1 2 3 4 5 6 7 8 9 10 11 12 13
LevelTraversal(T): q = InitQueue() q.push(T) while q.not_empty(): # 记录当前开始时队列长度 # 每轮遍历该长度数目元素,严格分层遍历节点 for i=0 to len(q): cur_node = q.pop_left() visit(cur_node) if cur.left: q.push_back(cur.left) if cur.right: q.push_back(cur.right)
OptimalBST(P[1..n]) // 动态规划法构建最优二叉查找树 // 输入:P[1..n]n个键查找概率 // 输出:在最优BST中查找成功的平均比较次数,最优BST子树根表 for i = 1 to n do C[i, i-1] = 0 C[i, i] = P[i] R[i, i] = i C[n+1, n] = 0 // 初始化平均查找次数表、子树根表 for d = 1 to n-1do // d为二叉树节点数 for i = 1 to n-d do // n-d是为了控制j的取值 j = i + d minval = \infty for k = i to j do // 遍历设置二叉树根节点 if C[i, k-1] + C[k+1, j] < minval minval = C[i, k-1] + C[k+1, j] kmin = k R[i, j] = kmin sum = P[i] for s=i+1 to j do sum += P[s] C[i, j] = minval + sum return C[1, n], R
算法特点
算法效率
算法时间效率为立方级
算法空间效率为平方级
AVL Tree
AVL树:要求其节点在左右子树高度差不能超过1的平衡二叉树
基本思想:总能通过一次简单的节点重排使树达到平衡
如果树插入操作使得一棵AVL树失去平衡,利用旋转对树作
变换
若有多个这样的节点,找出最靠近新插入的叶子节点不平衡
结点,然后旋转以该节点为根的子树
AVL树高度h即为其查找、插入效率
包含n个节点AVL树高度h满足
$\lfloor log_2 n \rfloor \leq h < 1.4405log_2(n+2) - 1.3277$
最差情况下,操作效率$\in \Theta(logn)$
平均而言,在n不是太小时,高度h平均为
$1.01log_2 n + 0.1$(几乎同折半查找有序数组)
AVL树缺点(平衡代价),阻碍AVL树成为实现字典的标准结构
需要频繁旋转
维护树的节点平衡
总体比较复杂
旋转
按照节点平衡符号进行旋转:+左旋、-右旋
单旋:不平衡节点、不平衡子节点不平衡因子符号相同
全为+:不平衡节点左旋
全为-:不平衡节点右旋
双旋:不平衡节点、不平衡子节点不平衡因子符号不同
先旋转不平衡子节点
再旋转不平衡节点
优先考虑最底层、不平衡节点
插入节点
AVL树插入关键:查找不平衡节点
节点中应有存储其平衡因子的实例变量
插入过程中经过每个节点返回当前节点子树深度是否变化
比较节点平衡因子、子节点深度变化返回值判断是否平衡
插入过程中查询的每个节点都有可能不平衡
自下而上返回深度变化情况,优先旋转最底层不平衡节点
4种插入情况
根据插入情况的不同,对最靠近新插入叶子节点的不平衡点T
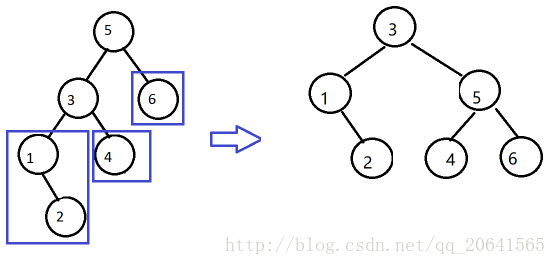
LL
插入T左儿子L的左子树LL:平衡因子全-
即T到最底层叶节点(只可能有一个)的路径为LL(中间省略)
R-rotation:右单转,对T做一次右旋即可平衡
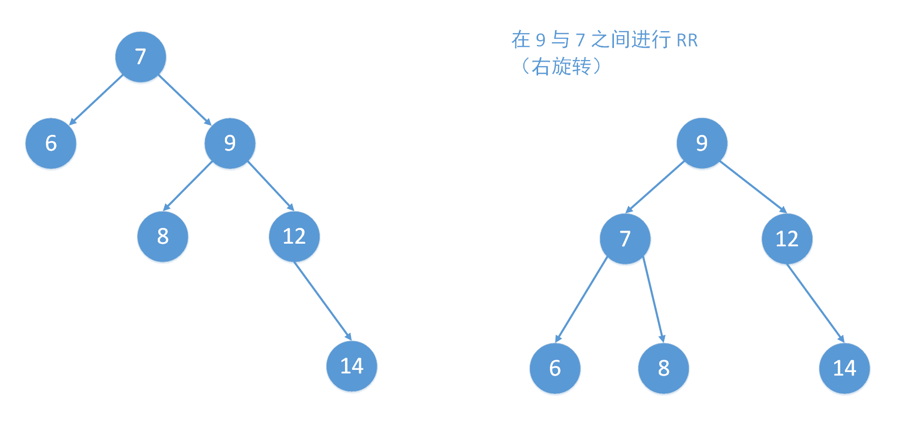
RR
插入T右儿子R的右子树R:平衡因子全+
即T到最底层叶节点(只可能有一个)的路径为RR(中间省略)
L-rotation:左单转,对T做一次左旋即可平衡
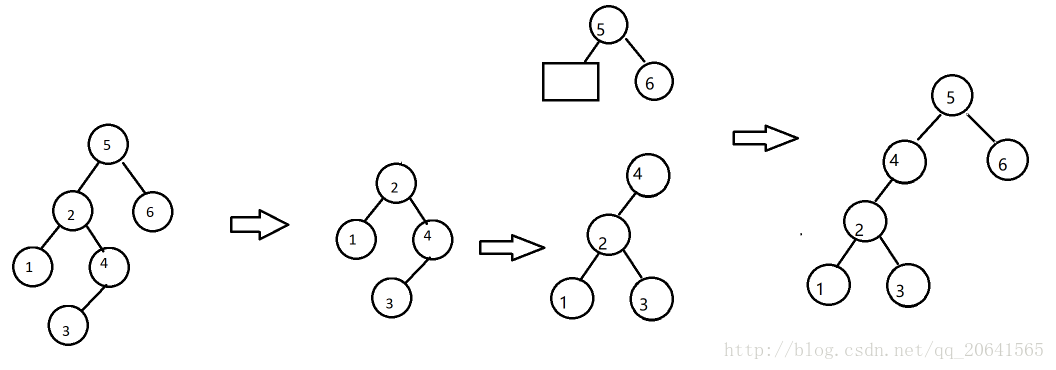
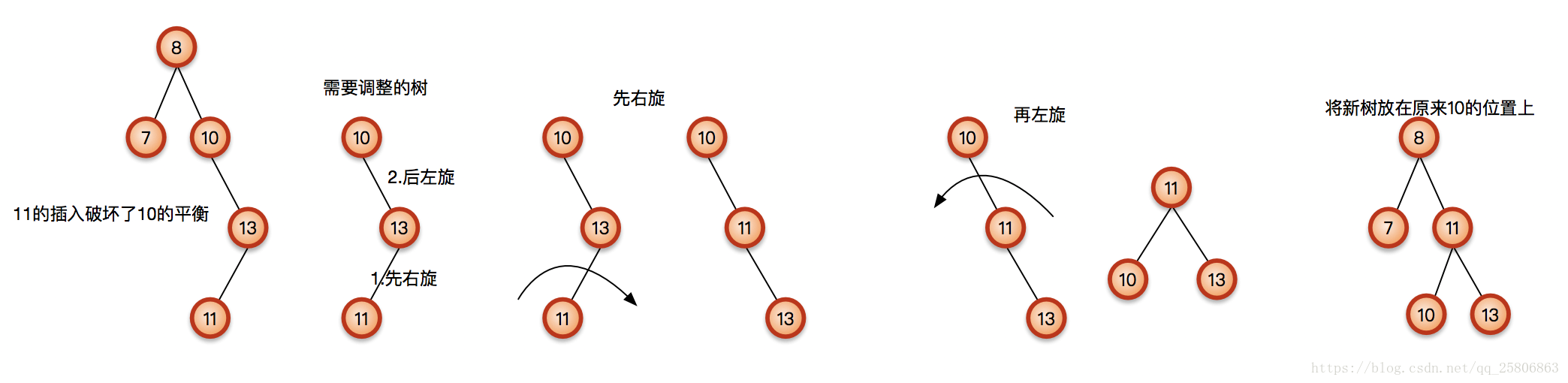
LR
插入T左儿子L的右子树R:平衡因子-+
即T到最底层叶节点(只可能有一个)的路径为LR(中间省略)
LR-rotation:左右双转
先对左儿子L做一次左旋,变成LL模式
在LL模式下,再对T做一次右旋
RL
插入T右儿子R的左子树L:平衡因子+-
即T到最底层叶节点(只可能有一个)的路径为RL(中间省略)
RL-rotation:右左双转
先对右儿子R做一次右旋,变成RR模式
在RR模式下,再对T做一次左旋
实现
删除节点
在AVL树中删除键相对而言比较困难,但也是对数级的
实现
Red-Black Tree
红黑树:能够容忍同一节点的一棵子树高度是另一棵的2倍
Splay Tree
分裂树:
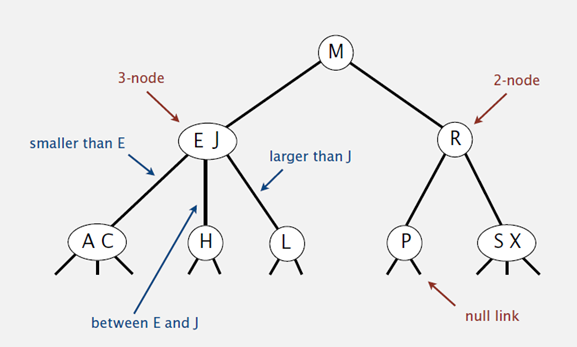
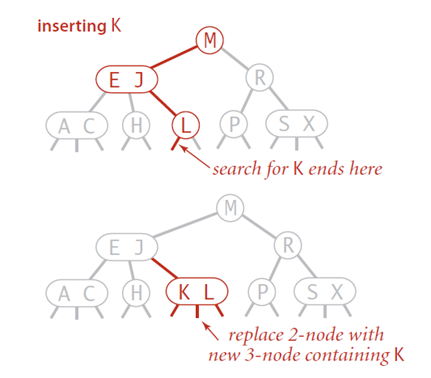
2-3树
2-3树:可以包含两种类型的节点2节点、3节点,树的所有叶子节点
必须位于同一层
2-3树的高度即决定其查找、插入、删除效率
节点数为n的2-3数高度h满足
$log_3(n+1)-1 \leq h \leq log_2(n+1) - 1$