高维检索树
K-dimentional Tree
Kd树:循环遍历各维度,按该维度取值二分数据
对高维数据进行快速搜索二叉树
- 超平面都垂直于轴的BSPTree
Kd树对样本点的组织表示对k维空间的划分
- 每个节点对应k维空间中超矩形区域
- 构造kd树相当于用垂直于坐标轴超平面不断划分k维空间, 得到一系列超矩形区域
Kd树构建目标
- 树应该尽量平衡,即分割应尽量均匀
- 最大化邻域搜索的剪枝
建树
- 输入:数据点$X_i, i=1,2,\cdots,N$
- 确定划分维度(轴)
- 选择方差最大的轴,使得数据尽量分散
- 按次序循环遍历所有轴:方便查找时定位轴
- 选择该维度上数值中位数作为划分点
- 中位数查找方法
- 各维度统一全体排序、记录
- 抽样,使用样本中位数
- 小于中位数的数据点划分至左子树,否则划分至右子树
- 中位数查找方法
- 递归建立左、右子树直至无法继续划分
- 节点中包含数据项数量小于阈值
查找K近邻
- 输入:Kd树、目标点x
在Kd树中找出包含目标点x的叶节点,以之为近邻点
- 从根节点出发,与节点比较对应坐标值,递归访问至叶节点 为止
- 目标点在训练样本中不存在,必然能够访问到叶节点
沿树回溯,检查节点是否距离目标点更近,尝试更新
检查该节点另一子区域是否可能具有更近距离的点
- 即考察以目标点为圆心、当前近邻距离为半径圆,同划分轴 是否相交
- 则只需比较目标点同相应切分平面距离、近邻距离
若目标点同该对应切分平面距离小于近邻距离
- 则将目标节点视为属于该子区域中的点
- 从节点未访问子树开始重复以上步骤,进行近邻搜索
否则继续回退
退回到根节点时,搜索结束,近邻点
- 回溯过程中需要盘对子域是否访问过,可以通过标记、比较相应 轴坐标等方式判断
- k>1的情况类似,不过检测时使用最远近邻,新近邻需要和所有 原近邻依次比较
其他操作
插入新节点
- 从根节点出发,根据待插入节点、当前节点在对应维度取值确定 插入左、右子树
- 遍历直至叶子节点,插入
删除节点
简单方法:将待删除节点子节点组成新集合,对其重新构建, 将新子树挂载在原被删节点位置
分类讨论:设删除节点T对应划分维度为D
- 节点无子树:直接删除
- 节点有右子树
- 在右子树寻找维度D取值最小节点P,替换被删除节点T
- 在右子树递归处理删除节点P
- 节点无右子树有左子树
- 在左子树寻找维度D取值最小节点P,替换被删除节点T
- 将T的左子树作为P的右子树
- 在右子树递归处理删除节点P
查找维度D最小点
- 若当前结点切分维度为D:只需查找左子树
- 否则需要对左、右子树分别递归搜索
Vantage Point Tree
VP树:任选样本点,按照数据点与该点距离二分数据
对高维数据进行快速搜索二叉树
VP树对样本点的组织表示对k维空间的划分
- 每个节点对应k维空间中一个球形划分
- 构造kd树相当于用以给定样本点为球心不断划分k维空间, 得到一系列球内、球外区域
建树
- 输入:数据$X_i, i=1,2,\cdots,n$
- 选择某数据点$X_v$作为划分球心
- 计算其他数据点距离$D_i = d(X_i, X_v)$
- 求出$D_i$中位数$M$
- 与$X_v$距离$D_i \leq M$的数据点$D_i$划分至左子树
- 与$X_v$距离$D_i \gt M$的数据点$D_i$划分至右子树
Rectangle Tree
R树:将空间划分为有重叠的
- B树高维推广
- 类似B树将一维区间划分为多个不重叠的子区间
- 同样是平衡树,所有叶子位于同一层上
- R树退化至1维有分割区间重叠问题,效果不如B树
性质
- $M$:节点中最大键数量
- $m \leq \frac M 2$:节点中条目最小数量
非根叶节点包含$m-M$索引记录:$I$表示可在空间中完全覆盖 节点中条目点的MBR
非根、非叶节点包含$m-m$个子节点:$I$表示可在空间中完全 覆盖节点中条目矩形的MBR
根节点条目数$[2, m]$,除非为叶子节点
- minimal bounding rectangle:MBR,最小边界矩形
节点结构
叶子节点结构:$(I, tuple-ids)$
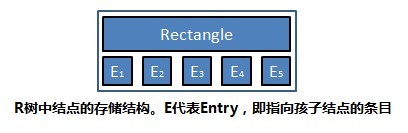
- $I((s_1, e_1), (s_2, e_2), \cdots, (s_n, e_n))$: n维空间中矩形
- $tuple-ids$:节点包含的记录
非叶节点:$(I, child-pointer)$
操作
建树
矩形搜索
1 | SearchRect(T, S, ret): |
选择所属叶子
1 | ChooseLeaf(T, E): |
插入新条目
1 | Insert(T, E): |
调整树
1 | AdjustTree(T, L): |

