查找/搜索树
总述
- 二叉查找树:最基础的查找树,但是不平衡时效率很差
- 自平衡查找树:使用旋转技术得到平衡二叉树
- 多路查找树:使用多叉树达到平衡
- 树高度一般即决定其查找、插入、删除效率
- 以代码复杂性、插入节点时间代价,换取查询时$logN$性能
Self-Balancing Binary Tree
自平衡查找树:如果节点插入、删除产生了一棵违背平衡要求的树, 就从称为旋转的一系列特定变换中选择一种,重新构造树使得 树满足平衡要求
- 不同的对平衡的定义产生了不同的实现
- 这种方案属于变治法中实例化简
Balance Factor
平衡因子:节点左、右子树高度差(一般右树-左数)
AVL树中平衡情况下节点平衡因子只能为-1、+1、0
更新节点后可能存在不平衡节点,其平衡因子可能变为-2、+2
平衡因子也可以被定义为左右子树叶子数
Rotation
旋转需要使得二叉树平衡时,保证二叉树依然有序
左旋:节点平衡因子符号为正,即右子树高于左子树
- 节点T下沉为其右儿子R的左儿子
- 如果右儿子R本身有左子树RL,则左子树RL成为节点T 新右子树
右旋:节点平衡因子符号为负,即左子树高于右子树,
- 节点T下沉为其左儿子L的右儿子
- 如果左儿子L本身有右子树LR,则右子树LR成为节点T 新左子树
- 旋转只涉参与选择的至多3个节点指针变化,其余节点状态保持
- “旋转”行为确实类似:节点绕其子节点旋转,子节点旋转后上浮 成为父节点
- 参与旋转的两个节点也称为轴
分类
- AVL树
- 红黑树
- 分裂树
Multiway Search Tree
多路查找树:允许查找树中单个节点中不止包含一个元素
- 二叉查找树的推广,用于磁盘超大数据集的高效存取
- 此方案属于变治法中改变表现
分类
- 2-3树
- 2-4树
- B树
- B+树
Binary Search Tree
二叉查找树:分配给每个父母顶点的数字都比其左子树中数字大, 比右子树数字小
- 二叉树有序,保证二叉树能够快速找到中间元素,从而支持 二分查找
特点
对于n个顶点的二叉树,满足 $ \lfloor {log_{2}^{n}} \rfloor \leq h \leq n-1 $
二叉查找树的查找算法效率取决于二叉树的高度
平均情况下,查找、插入、删除时间$\in Theta(logn)$
最差情况下(严重不平衡的树,接近链表结构),树高度 h接近节点数n,查找、插入、删除时间$\in Theta(n)$
包含n个键的二叉查找树总数量 $c(n) = \frac 1 {n+1} C_{2n}^n, c(0)=1$
应用
- 查找
操作
查找
在给定二叉查找树中查找给定键值K
如果树为空,查找失败
若树不为空,将查找键K和树根节点K(r)比较
- 相等则查找停止
- $K < K(r)$:在左子树中继续查找
- $K > K(r)$:在右子树中继续查找
特点
- 算法时间效率
- 最差情况下,二叉树完全偏斜,需要进行n次比较
- 随机情况下,查找n个随机键构造的二叉树比较次数$2logn$
插入
除非是空树,否则总是把新键K插入叶子节点中
- 通过查找K确定合适插入位置(叶子节点)
- 若K大于叶子节点键值,则作为右子女,否则作为左子女
最优二叉查找树
对集合中元素确定的查找概率,成功查找的平均比较次数最小的 二叉查找树(可以扩展到包含不成功查找)
- $a_i, i=1,2,\cdots,n$:从小到大互不相等的键
- $p_i, i=1,2,\cdots,n$:键查找概率
- $T_i^j$:由键$a_i, \cdots, a_j$构成的二叉树
- $C(i, j)$:成功查找的最小平均查找次数
动态规划构造
根据最优化法则,最优二叉查找树左右子树均是最优排列的
二叉树$Ti^j$有序,设树根为$a_1$,$a_2,..,a{k-1}$构成 的左子树、$a_{k+1},..,a_j$构成右子树均是最优排列的
递推式如下
$1 \leqslant i \leqslant j \leqslant n$
$1 \leqslant i \leqslant n+1, C(i, i-1)=0$:空树
$1 \leqslant i \leqslant n, C(i, i)=p_i$:单节点
1 | OptimalBST(P[1..n]) |
算法特点
- 算法效率
- 算法时间效率为立方级
- 算法空间效率为平方级
AVL Tree
AVL树:要求其节点在左右子树高度差不能超过1的平衡二叉树
基本思想:总能通过一次简单的节点重排使树达到平衡
- 如果树插入操作使得一棵AVL树失去平衡,利用旋转对树作 变换
- 若有多个这样的节点,找出最靠近新插入的叶子节点不平衡 结点,然后旋转以该节点为根的子树
AVL树高度h即为其查找、插入效率
包含n个节点AVL树高度h满足 $\lfloor log_2 n \rfloor \leq h < 1.4405log_2(n+2) - 1.3277$
最差情况下,操作效率$\in \Theta(logn)$
平均而言,在n不是太小时,高度h平均为 $1.01log_2 n + 0.1$(几乎同折半查找有序数组)
AVL树缺点(平衡代价),阻碍AVL树成为实现字典的标准结构
- 需要频繁旋转
- 维护树的节点平衡
- 总体比较复杂
旋转
按照节点平衡符号进行旋转:+左旋、-右旋
单旋:不平衡节点、不平衡子节点不平衡因子符号相同
- 全为
+:不平衡节点左旋 - 全为
-:不平衡节点右旋
- 全为
双旋:不平衡节点、不平衡子节点不平衡因子符号不同
- 先旋转不平衡子节点
- 再旋转不平衡节点
- 优先考虑最底层、不平衡节点
插入节点
AVL树插入关键:查找不平衡节点
- 节点中应有存储其平衡因子的实例变量
- 插入过程中经过每个节点返回当前节点子树深度是否变化
- 比较节点平衡因子、子节点深度变化返回值判断是否平衡
- 插入过程中查询的每个节点都有可能不平衡
- 自下而上返回深度变化情况,优先旋转最底层不平衡节点
4种插入情况
根据插入情况的不同,对最靠近新插入叶子节点的不平衡点T
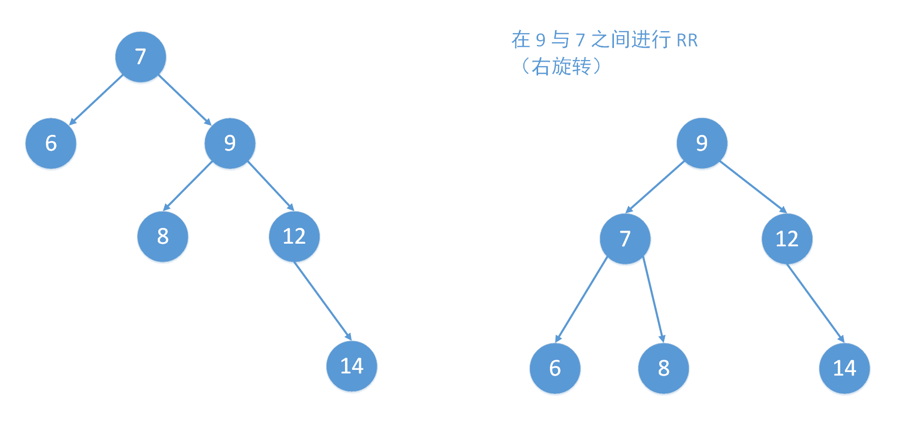
LL
插入T左儿子L的左子树LL:平衡因子全-
- 即T到最底层叶节点(只可能有一个)的路径为LL(中间省略)
- R-rotation:右单转,对T做一次右旋即可平衡
RR
插入T右儿子R的右子树R:平衡因子全+
- 即T到最底层叶节点(只可能有一个)的路径为RR(中间省略)
- L-rotation:左单转,对T做一次左旋即可平衡
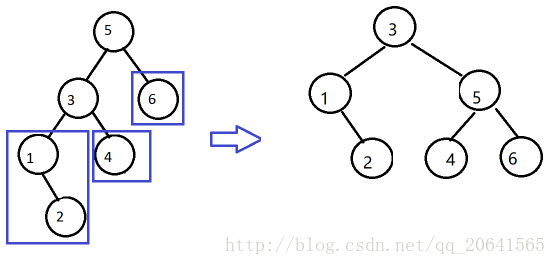
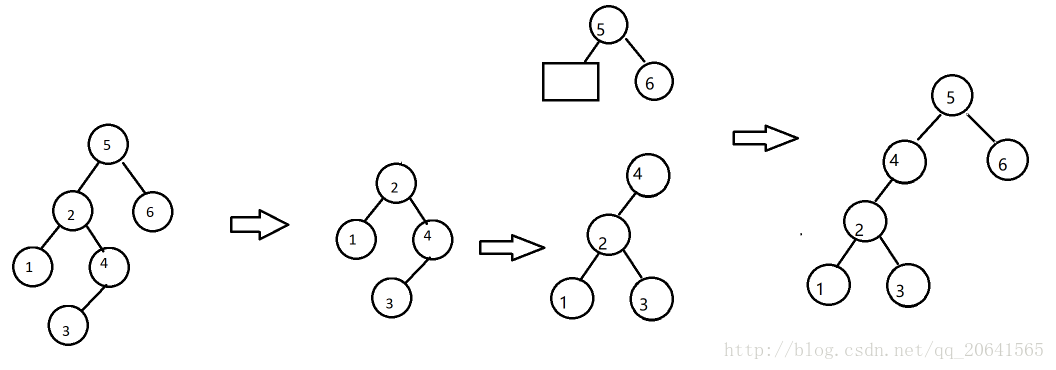
LR
插入T左儿子L的右子树R:平衡因子-+
- 即T到最底层叶节点(只可能有一个)的路径为LR(中间省略)
- LR-rotation:左右双转
- 先对左儿子L做一次左旋,变成LL模式
- 在LL模式下,再对T做一次右旋
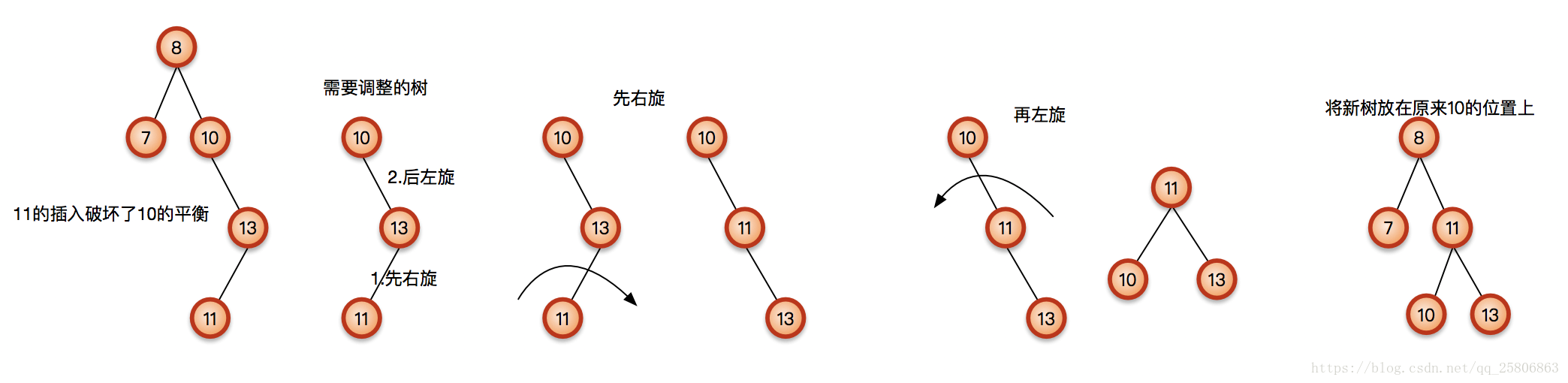
RL
插入T右儿子R的左子树L:平衡因子+-
- 即T到最底层叶节点(只可能有一个)的路径为RL(中间省略)
- RL-rotation:右左双转
- 先对右儿子R做一次右旋,变成RR模式
- 在RR模式下,再对T做一次左旋
实现
删除节点
- 在AVL树中删除键相对而言比较困难,但也是对数级的
实现
Red-Black Tree
红黑树:能够容忍同一节点的一棵子树高度是另一棵的2倍
Splay Tree
分裂树:
2-3树
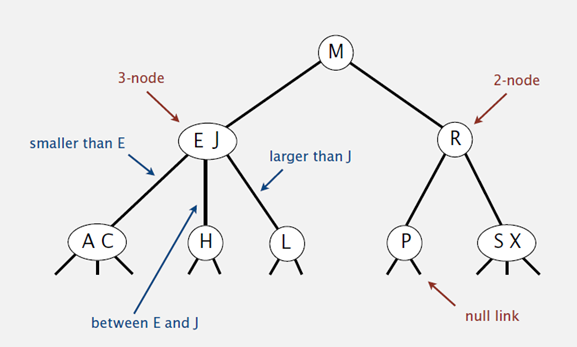
2-3树:可以包含两种类型的节点2节点、3节点,树的所有叶子节点 必须位于同一层
2-3树的高度即决定其查找、插入、删除效率
- 节点数为n的2-3数高度h满足 $log_3(n+1)-1 \leq h \leq log_2(n+1) - 1$
- 最差、平均情况下,操作效率$\in \Theta(logn)$
2-3树总是高度平衡
- 所有叶子节点位于同一层,即树根到其路径长度相同
- 2-3树平衡代价
- 树中节点可以有1或2个键,需要处理2种节点类型
- 拆分3节点的情况有很多种
节点类型
2节点:只包含1个键K、2个子女
- 左子女:作为所有键都小于K的子树的根
- 右子女:作为所有键都大于K的子树的根
3节点:两个有序键$K_1 < K_2$、3个子女
- 最左边子女:作为键值小于$K_1$的子树的根
- 中间子女:作为键值位于$[K_1, K_2]$之间子树的根
- 最右边子女:作为键值大于$K_2$的子树的根
- 类似的还有2-4树
查找
如果根是2节点,当作二叉树查找
- 若K等于根键值,停止
- 若K小、大于根键值,在左、右子树中查找
若根是3节点
- 和两个键值比较,有相等,停止
- 否则能确定应该在3棵子树中哪棵继续查找
插入节点
除非是空树,否则总是把新键K插入叶子节点中
查找K确定合适的插入位置(叶子节点)
若叶子节点2节点,根据大小关系将K作为第一个键或第二个键 插入
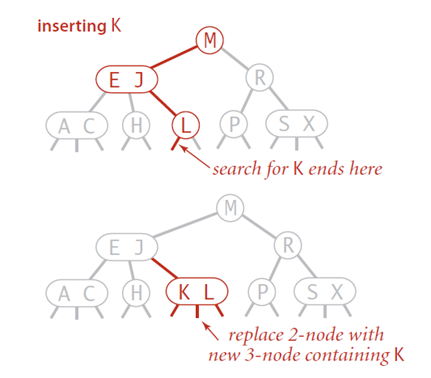
若叶子节点3节点,把叶子分裂为两个节点:3个键中最小的放入 第一个叶子中,最大的放入第二个叶子中,中间的键提升到原 叶子节点父母中
- 若叶子就是根,则需要创建新根容纳中间键
- 中间键的提升可能会导致父母节点分裂,并引起祖先链条上 多个节点的分裂
删除节点
B树
B树:允许节点可以有$1~m-1$个键($2~m$个子女)
1 |
|
- $m$:B树阶数,节点允许最大子女数
- 节点最多允许有$m-1$个条目
- $m=2$即为二叉树、$m=3$即为2-3树
- 键:用于构建树的关键字,和具体条目类似于键值对
根节点具有$2~m$个子女,除非为叶子节点
非根、非叶节点具有$[\lceil m/2 \rceil, m]$个子女
即具有$[\lceil m/2 \rceil - 1, m]$个有序键
其中子树$T_0$所有键小于$K_1$,子树$T_1$中所有键大于 等于$K_1$小于 $K_2$,以此类推
B树是完美平衡的:所有叶子节点在同一层上
查找
算法
- 输入:B树、目标查找键
- 输出:查找键所属B树节点(若存在)
从根节点开始,比较查找键k和节点中键序列大小
- 节点中键有序,若B树阶数足够大,可考虑折半查找
若在节点键序列中找到匹配键,则查找成功、返回
否则根据比较结果选择合适分支,顺着指针链前进,在相应子女 节点中进行查找
1 | BTreeSearch(T, k): |
分裂
算法
- 输入:待分裂节点父节点、待分裂节点序号
计算待分裂节点分裂中心
- 将分裂中心右侧数据移动至新节点
将节点分裂中心、新节点提升至父节点
1 | BTreeNodeSplit(T, ptr_idx): |
插入
- 输入:B树根T、待插入键K
- 假设B树中不存在键K,否则查找、更新对应值即可
- 根据需要插入键K,查找需要插入的叶子节点L
- 若叶子节点L键数小于m-1,直接插入结束
- 否则以叶子节点键值中位数mid为中心分裂
- 将mid插入叶子节点L父节点P中
- 将mid左子支指向分裂后左子树、右子支指向分裂后右子树
- 对父节点尝试操作
1 | BTreeInsert(T, k) |
- 此实现是考虑节点都有空位容纳新键,节点插入新键后再 判断是否需要分裂
删除#todo
应用
- 类似一般查找树,把数据记录插入初始为空的树中构造B树
B+树
B+树:B树的一种变形树
- 其中非叶节点只有索引作用,跟记录相关信息均存放在 叶结点中
- B+树中所有叶结点构成有序链表,可以按照键次序遍历
查找
算法
从根开始,比较查找键K和节点中键大小,选择合适指针,顺着 指针链前进
指针链指向可能包含查找键的叶子节点,在其中查找K
- 父母节点、叶子节点都是有序的,如果B树次数足够 大,可以考虑使用折半查找
算法效率
以B树作索引存储大型数据文件为例
查找指定查找键访问B树节点数量为B树高度$h+1$ (即磁盘访问次数)
次数为m、高度为h的B树能够包含最少节点数为 $n \geqslant 4 \lceiling m/2 \rceiling ^ {h-1} -1$, 即$h \leqslant \lfloor log_{[m/2]} \frac {n+1} 4 \rfloor + 1$
所以在B树中查找,访问磁盘次数$\in O(logn)$
- 实际应用中,磁盘访问次数很少超过3,因为B树的根、甚至 是第一层节点会存储在内存中减少磁盘访问次数
插入
算法
查找新记录键K对应的叶子节点
若叶子节点中还有空间存放此记录,在保持键有序的情况下插入
若节点中没有空间
- 将节点分裂,后半部分记录放在新节点中
- 新节点中最小键$K^{‘}$、指向其的指针插入原叶子节点 父母节点中(原叶子节点键、指针之后)
- 插入过程可以一直回溯到树根,甚至直到树根分裂
其他考虑
- 查找新记录对应叶子节点时就分裂满节点,可以避免递归分裂
- 将满叶子节点中部分键移动给兄弟节点,同时替换父母节点中的 键值(保证B树特点),增加少许复杂度以节约空间
算法特点
- 算法效率
- 算法时间效率$\in O(logn)$
应用
- B+树是存储结构化记录数据集合最重要的索引结构
- 所有数据记录(键)按照升序存储在叶子节点中,其父母 节点作为索引
- B+树中节点常常对应磁盘中页
- 考虑到访问磁盘页面是比较内存中键值比较时间多好几个 数量级,磁盘访问次数是衡量B树效率的主要指标
标

