距离
- 距离可认为是两个对象 $x,y$ 之间的 相似程度
- 距离和相似度是互补的
- 可以根据处理问题的情况,自定义距离
Bregman Divergence
布雷格曼散度:穷尽所有关于“正常距离”的定义
- 给定 $R^n * R^n \rightarrow R$ 上的正常距离 $D(x,y)$,一定可以表示成布雷格曼散度形式
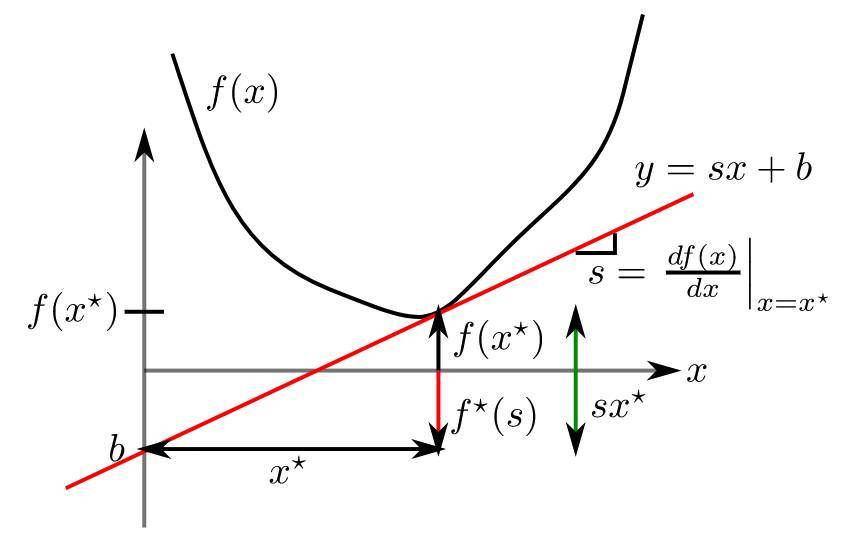
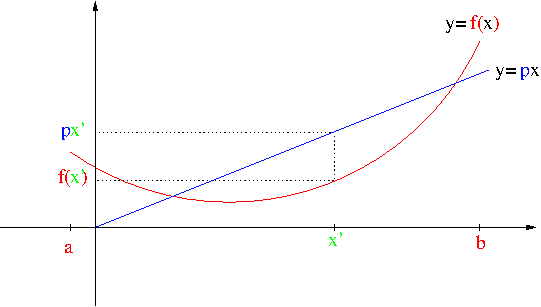
- 直观上:$x$处函数、函数过$y$点切线(线性近似)之差
- 可以视为是损失、失真函数:$x$由$y$失真、近似、添加噪声得到
特点
- 非对称:$D(x, y) = D(y, x)$
- 不满足三角不等式:$D(x, z) \leq D(x, y) + D(y, z)$
- 对凸集作 Bregman Projection 唯一
- 即寻找凸集中与给定点Bregman散度最小点
- 一般的投影指欧式距离最小
| Domain |
$\Phi(x)$ |
$D_{\Phi}(x,y)$ |
Divergence |
| $R$ |
$x^2$ |
$(x-y)^2$ |
Squared Loss |
| $R_{+}$ |
$xlogx$ |
$xlog(\frac x y) - (x-y)$ |
|
| $[0,1]$ |
$xlogx + (1-x)log(1-x)$ |
$xlog(\frac x y) + (1-x)log(\frac {1-x} {1-y})$ |
Logistic Loss |
| $R_{++}$ |
$-logx$ |
$\frac x y - log(\frac x y) - 1$ |
Itakura-Saito Distance |
| $R$ |
$e^x$ |
$e^x - e^y - (x-y)e^y$ |
|
| $R^d$ |
$\ |
x\ |
$ |
$\ |
x-y\ |
$ |
Squared Euclidean Distance |
| $R^d$ |
$x^TAx$ |
$(x-y)^T A (x-y)$ |
Mahalanobis Distance |
| d-Simplex |
$\sum_{j=1}^d x_j log_2 x_j$ |
$\sum_{j=1}^d x_j log_2 log(\frac {x_j} {y_j})$ |
KL-divergence |
| $R_{+}^d$ |
$\sum_{j=1}^d x_j log x_j$ |
$\sum{j=1}^d x_j log(\frac {x_j} {y_j}) - \sum{j=1}^d (x_j - y_j)$ |
Genelized I-divergence |
单点距离
Minkowski Distance
闵科夫斯基距离:向量空间 $\mathcal{L_p}$ 范数
表示一组距离族
- $p=1$:Manhattan Distance,曼哈顿距离
- $p=2$:Euclidean Distance,欧式距离
- $p \rightarrow \infty$:Chebychev Distance,切比雪夫距离
闵氏距离缺陷
Mahalanobis Distance
马氏距离:表示数据的协方差距离
LW Distance
兰氏距离:Lance and Williams Distance,堪培拉距离
- 特点
- 对接近0的值非常敏感
- 对量纲不敏感
- 未考虑变量直接相关性,认为变量之间相互独立
Hamming Distance
汉明距离:差别
- $v_i \in {0, 1}$:虚拟变量
- $p$:虚拟变量数量
Embedding
- 找到所有点、所有维度坐标值中最大值 $C$
- 对每个点 $P=(x_1, x_2, \cdots, x_d)$
- 将每维 $x_i$ 转换为长度为 $C$ 的 0、1 序列
- 其中前 $x_i$ 个值为 1,之后为 0
- 将 $d$ 个长度为 $C$ 的序列连接,形成长度为 $d * C$ 的序列
Jaccard 系数
Jaccard 系数:度量两个集合的相似度,值越大相似度越高
Consine Similarity
余弦相似度
欧式距离
点到平面
- $T={(x_1,y_1),(x_2,y_2),\cdots,(x_n,y_n)}$:样本点集
- $wx + b = 0$:超平面
Functional Margin 函数间隔
函数间隔可以表示分类的正确性、确信度
点集与超平面的函数间隔取点间隔最小值 $\hat{T} = \min_{i=1,2,\cdots,n} \hat{\gamma_i}$
超平面参数 $w, b$ 成比例改变时,平面未变化,但是函数间隔成比例变化
Geometric Margin 几何间隔
几何间隔一般是样本点到超平面的 signed distance
几何间隔相当于使用 $|w|$ 对函数间隔作规范化
- $|w|=1$ 时,两者相等
- 几何间隔对确定超平面、样本点是确定的,不会因为超平面表示形式改变而改变
点集与超平面的几何间隔取点间隔最小值 $\hat{T} = \min_{i=1,2,\cdots,n} \hat{\gamma_i}$
Levenshtein/Edit Distance
(字符串)编辑距离:两个字符串转换需要进行插入、删除、替换操作的次数
组间距离
Single Linkage
Average Linkage
Complete Linkage