组合问题
总述
寻找(明确地、隐含地)寻找一个组合对象
- 排列
- 组合(整数规划)
- 子集
这些对象能满足特定条件并具有想要的属性
- 价值最大化
- 成本最小化
特点
无论从理论角度、实践角度而言,组合问题是计算领域最难的问题
随着问题规模增大,组合对象数量增长极快
没有一种已知算法,能在可接受的时间范围内,精确的解决 大部分组合问题,且被普遍认为不存在(未被证实)
有些组合问题有高效求解算法,是幸运的例外
从更抽象的角度看,旅行商问题、图填色问题也是组合问题的特例
思路
exhaustive search:(穷举搜索)是简单的蛮力方法
- 生成问题域每个元素
- 选出满足问题约束的元素
- 最后寻找期望元素
因为可能性太多,基本可能从动态规划方向着手
背包问题
给定n个重量为$w_1, w_2, \cdots, w_n$价值为$v_1, v_2, …, vn$ 的物品和承重为$W$的背包,求能够装进背包的最有价值物品子集
蛮力算法
算法
- 考虑所有n个物品的子集
- 计算每个子集重量,找出可行子集
- 找到可行子集中价值最大子集
经典自底向上动态规划
依次求解所有子问题、记录
算法
设$F(i, j)$为由前i个物品、承重量为j的背包得到最优解
不包括第i个物品的子集中,最优子集价值为$F(i-1, j)$
包括第i个物品的子集中,最优子集是由该物品和前i-1个物品 中能够放进承重量为$j-w_i$的背包的最优子集组成,总价值为 $v_i + F(i-1, j-w_i)$
则递推式为
1 | Knapsack(Ws[1..n], Vs[1..n], W) |
算法特点
- 算法效率
- 时间效率$\in \Theta(nW)$
- 空间效率$\in \Theta(nW)$
- 回溯求最优解组成效率$\in O(n)$
自顶向下动态规划
算法
1 | MFKnapsack(i, j) |
算法特点
- 算法效率
- 相较于经典自底向上算法,时间效率提升常数因子,但是 效率仍然$\in \Theta(nW)$
- 相较于自底向上算法空间优化版版本而言,空间效率较低
分支界限法
不失一般性认为,物品按照价值重量比$v_i / w_i$降序排列, 可以简化问题
第i层节点上界可取$ub = v + (W - w)(v{i+1} / w{i+1})$
- $v$:已选物品价值
- $W - w$:背包剩余承重量
- $v{i+1}/w{i+1}$:剩余物品单位单位最大价值
更紧密、复杂的上界 $ub = v + \sum{k=i+1}^K v_k + (W - \sum{k=1}^K w_k)v_K / w_K$
算法
特点
- 分支界限法求解背包问题中,每个中间节点都是给定物品的子集 ,是背包问题的可行解
背包问题近似算法
贪婪算法
算法
对物品按照价值重量比$r_i = v_i / w_i, i=1,2,\cdots,n$ 降序排列
重复以下直到有序列表中不留下物品
- 如果列表中当前物品可以装入,则放入背包并处理下个物品
- 否则忽略,直接处理下个物品
特点
原始的贪婪算法解的精确率没有上界
考虑:承重量为$W$背包,如下物品
|物品|重量|价值|价值/重量| |——-|——-|——-|——-| |1|1|2|2| |2|w|w|1|
则近似解精确率$r(s_a) = W/2$无上界
增强版贪婪算法:取贪婪算法解、能装载的价值最大单个物品 价值中较大者
- 此改进的性能比可以降到2
近似方案
背包问题的存在多项式时间的系列算法,可以调节算法中参数$k$ 得到满足任意预定义精确率的近似解$s_a^{(k)}$
Sahni方案
- 生成所有小于k个物品的子集
- 向贪婪算法一样,向每个能装入背包的子集添加剩余物品中 价值重量比最大者
- 得到最有价值的修改后子集作为结果返回
Fully Polynomial Scheme
完全多项式方案
特点
Sahni方案理论意义远大于实用价值
- 其效率$\in O(kn^{k+1})$是n的多项式函数
- 但是是k的指数函数
完全多项式方案更加复杂,但没有效率为参数k指数的缺陷
Bin-Packing Problem
装箱问题:给定n个问题,大小都是不超过1的有理数,将其装进数量 最少的大小为1的箱子中
Graph-Coloring Problem
图着色问题:对给定图,求使得任何两个相邻顶点颜色都不同时, 需要分配给图顶点的颜色数量
划分问题
给定n个正整数${a_i, i=1,2,\cdots},判定能够将其划分为和相等 的两个子集
Subset-Sum Problem
给定n个正整数${a_i, i=1,2,\cdots}$,求子集$S$和为正整数d
回溯算法
约束
- 其中$s$为考虑考虑第i+1元素时,前i个元素选情况下的和
算法
假设集合元素按升序排列
根节点为未选择任何元素
依次考虑将元素$a_i$添加进子集S中
- 若满足约束条件、下个元素未考虑,继续考虑
- 否则回溯,重新考虑父母节点
直到找到子集满足和为d,或第二次回溯到根节点
特点
币值最大化
给定一排n个硬币,币值为正整数$c_i, i=1, 2, \cdots, n$(币值 不唯一),在原始位置不相邻的情况下,使得所选硬币总金额最大
动态规划
算法
记最大可选金额为$F(n)$将可行规划分为两组
- 包含最后一枚硬币,最大金额为$c_n + F(n-2)$
- 不包含最后一枚硬币,最大金额为$F(n-1)$
则递推方程为
1 | CoinRow(C[1..n]) |
算法特点
- 时间效率$\in \Theta(n)$
- 空间效率$\in \Theta(n)$
找零问题
需找零金额为n,最少需要多少面值为$d_1 < d_2 < \cdots < d_n$ 的硬币,考虑$d_1 = 1$的一般情况
动态规划
算法
记$F(n)$为总金额为n的数量最少的硬币数目,定义$F(0)=0$
得到n的途径只能是在$n-d_j$上加入面值为$d_j$的硬币,其中 $j=1, 2, \cdots, m$,且$n \geqslant d_j$
考虑所有满足条件$d_j$,选择使得且$F(n - d_j)$最小者
则递推式有
1 | ChangeMaking(D[1..m], n) |
硬币收集问题
在n * m格木板中存放有硬币,每格硬币最多一个,寻找左上角(1,1) 到右下角(n, m)路径,使得能够收集尽可能多硬币,每次只能向下、 向右移动
动态规划
算法
记$F(i, j)$为截止到第i行、第j列单元格$(i, j)$能够收集到最大 硬币数
- 单元格$(i, j)$只能经由$(i-1, j)$、$(i, j-1)$达到
- 初值1:假定$F(0, j)=0, F(i, 0)=0$
- 初值2;递推求解$F[1, j], F[i, 1]$
则递推方程为
1 | CoinCollection(C[1..n, 1..m]) |
算法特点
- 算法效率
- 计算每个单元格$F[i, j]$花费常量时间,所以算法时间 效率$\in \Theta(nm)$
- 算法空间效率$\in Theta(nm)$
n皇后问题
将n个皇后放在$n * n$的棋盘上,使得皇后之间不能相互攻击
回溯算法
算法
算法特点
说明
- $n \geqslant 4$的n皇后问题都可以在线性时间内求解,已经 找到一些可选公式,用于计算n皇后的位置
生成排列
生成集合排列问题可以抽象为生成${1,\cdots,n}$所有$n!$个排列的 问题
- 假设$(n-1)!$个排列已经生成
- 则可以把n插入n-1个元素中可能的n个位置中去,得到较大规模 问题的解
最小变化
- 在元素上使用小箭头标记其方向: $\overleftarrow 1 \overleftarrow 2 \overleftarrow 3$
- 如果元素k的箭头指向相邻的较小元素,称在此排列中是移动的
减常量法
1 | JohnsonTrotter(n) |
算法特点
- JsonTrotter是生成排列最有效算法之一,其运行时间和排列 数量成正比,即$\in \Theta(n!)$
字典序
减常量法
- 找到序列中最长递减后缀 $a{i+1} > a{i+2} > \cdots > a_{n}$
- 将$a_i$同序列中大于其的最小元素交换
- 将新后缀颠倒,使其变为递增序列,加入列表中
1 | LexicographicPermute(n): |
生成子集
集合$A[a_1, \cdots, a_n}$的所有子集可以分为两组
- 包含$a_n$:${a_1, \cdots, a_n}$的所有子集
- 不包含$a_n$的子集:把$a_n$添加进${a_1, \cdots, a_n}$子集 获得
- 同样的可以把集合抽象为位串,每个位串表示一个子集
减常量算法
字典序
按生成字典序(位串字典序)生成子集
- 将正序${1..n}$转换为二进制位串
- 依次按照二进制位串生成子集
- 位串中为1表示对应元素在子集中
挤压序
按照挤压序(位串挤压序)生成子集
- 将倒序{n..1}转换为二进制位串
- 依次按照二进制位串生成子集
- 位串中为1表示对应元素在子集中
Squashed Order:所有包含$aj$子集必须紧排在所有包含 $a_1, \cdots, a{j-1}$的子集之后
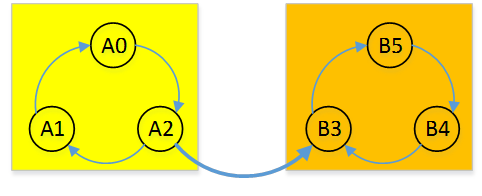
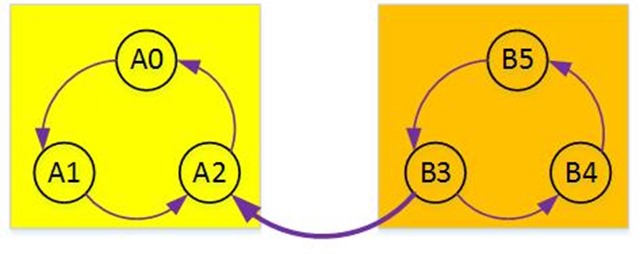
最小变化
每个子集和其直接前趋之间,要么增加一个元素,要么减少一个元素
- 即每个位串和直接前趋之间仅仅相差一位
1 | BRGC(n) |
球、桶问题
n个球放入m个桶中情况数量
球同、桶不同、无空桶
插板法
球同、桶不同、可空桶
插板法:可以假设m个桶中已经放好球,即m+n个相同球放入m个 不同桶、不允许空桶
球同、桶同、可空桶
动态规划
球数$i \geq j$桶数时递推式
- 若有桶均包含球:剩余球可能性$dp[i-j][j]$
- 若存在桶不包含球:剔除一个桶不影响总数
- 没有其余情况
球同、桶同、无空桶
动态规划:由$dp_4$得到
球不同、桶同、无空桶
第二类斯特林数
球数$i>j$桶数时递推式
- 考虑前$i-1$球已经占满所有桶,则最后球放入任何桶都是 新情况
- 考虑前$i-1$只占满$j-1$个桶,则最后球必须放入空桶
- 其他情况不可能
球不同、桶同、可空桶
在球不同、桶同、无空桶情况下枚举不空桶数目
球不同、桶不同、无空桶
在球不同、桶同、无空桶情况下对桶排序
球不同、桶不同、可空桶
- 每个球都有m中选择:$m^n$