基础
算法:一系列解决问题的明确指令,即对于符合一定规范的
输入,能够在有限时间内获得要求的输出
- 算法每步都必须没有歧义
- 必须确定算法所处理的输入的值域
- 同一算法可以用几种不同的形式描述
- 同一问题,可能存在几种不同的算法
- 同问题的不同算法,可能基于不同的解题思路,速度也会不同
算法正确性证明
- 对某些算法,正确性证明十分简单,对于另一些算法,可能十分
复杂
- 证明正确性的一般方法是使用数学归纳法,因为算法的迭代过程
本身就符合其所需的一系列步骤
- 根据特定输入追踪算法操作有意义,但是并不能证明算法的
正确性,只需要一个算法不能正确处理的输入实例就足够了
- 对于近似算法,常常试图证明算法所产生的误差,不超出预定义
的误差
算法分析方向
- 时间效率(time efficiency):算法运行速度
- 空间效率(space efficiency):算法需要多少额外的存储空间
- 简单性(simplicity):取决于审视者的眼光
- 简单的算法更容易理解、实现
- 相应程序包含更少的bug
- 一般性(generality)
- 最优性(optimality):与所解决问题的复杂度有关,与某算法
效率无关
- 是否每个问题都能够用算法的方法来解决
非确定性
Deterministic Alogrithm
确定算法:利用问题解析性质,产生确定的有限、无限序列使其收敛
于全局最优解
Nondeterministic Algorithm
不确定算法,包括两个阶段,将判定问题的实例l作为其输入
- 猜测(非确定)阶段:生成任意串S作为l候选解
- 验证(确定)阶段:把l、S作为输入,,若S是l解输出是,
否则返回否或无法停止
当选仅当对问题每个真实例,不确定算法会在某次执行中
返回是时,称算法能求解此问题
即要求不确定算法对某个解至少能够猜中一次、验证正确性,
同时不应该将错误答案判定为是
Nondeterministic Polynominal Algorithm:验证阶段时间
效率是多项式级的不确定算法
分析框架
- time complexity:算法运行速度
- space complexity:算法需要的额外空间
影响因素
输入规模$n$
其他因素
有些算法的运行时间不仅取决于输入规模,还取决于特定输入的细节
- worst-case efficiency:最坏情况下的效率
- best-case efficiency:最优情况下的效率
- average-case efficiency
- 平均效率的研究比最差、优效率研究困难很多
- 可以将输入划分为几种类型,使得对同类实例,算法基本
执行次数相同,推导各类输入的概率分布,得到平均次数
- amortized efficiency:应用于算法对同样的数据结构所执行
的一系列操作
- 有些情况下,算法单次执行时间代价高,但是n次运行的
总运行时间明显优于单次执行最差效率 * n
衡量角度
运行时间
Order of Growth
小规模输入运行时间差别不足以将高效算法与低效算法相区别,
对大规模输入忽略乘法常量,仅关注执行次数的order of growth
及其常数倍,即算法的渐进效率
按照算法渐进效率进行分类的方法缺乏使用价值,因为没有指定
乘法常量的值
但是对于实际类型输入,除了少数算法,乘法常量之间不会相差
悬殊,作为规律,即使是中等规模的输入,属于较优渐进
效率类型的算法也会比来自较差类型的算法效果好
对数函数:增长慢,以至于可以认为,对数级操作次数的算法能
瞬间完成任何实际规模输入
- 指数级:指数函数、阶乘函数
- 需要指数级操作次数的算法只能用于解决规模非常小的问题
渐进效率
渐进符号
$O(g(n))$
对于足够大的n,$t(n)$的上界由$g(n)$的常数倍确定,则
$t(n) \in O(g(n))$
即存在大于0的常数$c$、非负整数$n_{0}$,使得
增长次数小于等于$g(n) n \rightarrow \infty$
(及常数倍)的函数集合
$\Omega (g(n))$
对于足够大的n,$t(n)$的下界由$g(n)$的常数倍确定,则
$t(n) \in \Omega(g(n))$
即存在大于0的常数$c$、非负整数$n_{0}$,使得
增长次数大于等于$g(n) n \rightarrow \infty$
(及常数倍)的函数集合
$\Theta (g(n))$
对于足够大的n,$t(n)$的上、下界由$g(n)$的常数倍确定,则
$t(n) \in \Theta(g(n))$
即存在大于0的常数$c{1}, c{2}$、非负整数$n_{0}$,使得
增长次数等于$g(n) n \rightarrow \infty$(及常数倍)
的函数集合
极限比较增长次数
利用极限比较增长次数:比直接利用定义判断算法的增长次数方便,
可以使用微积分技术计算极限
基本渐进效率类型
| 类型 |
名称 |
注释 |
| $1$ |
常量 |
很少,效率最高 |
| $log_{n}$ |
对数 |
算法的每次循环都会消去问题规模的常数因子,对数算法不可能关注输入的每个部分 |
| $n$ |
线性 |
能关注输入每个部分的算法至少是线性运行时间 |
| $nlog_{n}$ |
线性对数 |
许多分治算法都属于此类型 |
| $n^{2}$ |
平方 |
包含两重嵌套循环的典型效率 |
| $n^{3}$ |
立方 |
包含三重嵌套循环的典型效率 |
| $2^{n}$ |
指数 |
求n个元素的所有子集 |
| $n!$ |
阶乘 |
n个元素集合的全排列 |
算法的数学分析
非递归算法
分析通用方案
- 决定表示输入规模的参数
- 找出算法的基本操作:一般位于算法最内层循环
- 检查算法基本操作执行次数是否只依赖于输入规模,如果和其他
特性有关,需要分别研究最差、最优、平均效率
- 建立算法基本操作执行次数的求和表达式(或者是递推关系)
- 利用求和运算的标准公式、法则建立操作次数的闭合公式,或
至少确定其增长次数
递归算法
用一个方程把squence的generic term和一个或多个其他项相关联,
并提供第一个项或前几项的精确值
- recurrence:递推式
- initial condition:序列起始值、递归调用结束条件
- 求解:找到序列通项的精确公式满足递推式、初始条件,或者
证明序列不存在
- general solution:满足递推方程所有解序列公式,通常
会包含参数
- particular solution:满足给定递推方程的特定序列,通常
感兴趣的是满足初始条件的特解
递归求解方法
method of forward substituion:从序列初始项开始,使用
递推方程生成给面若干项,从中找出能用闭合公式表示的模式
method of backward subsitution:从序列末尾开始,把序列
通项$x(n)$表示为$x(n-i)$的函数,使得i是初始条件之一,
再求和公式得到递推式的解
second-order linear recurrence with constant coefficients
:求解characteristic equation得到特征根得到通解
常见递推类型
decrease-by-one
减一法:利用规模为n、n-1的给定实例之间的关系求解问题
decrease-by-a-constant-factor
减常因子法:把规模为n的实例化简为规模为n/b的实例求解问题
divide-and-conquer
分治法:将给定实例划分为若干较小实例,对每个实例递归求解,如有必要,
再将较小实例的接合并为给定实例的一个解
平滑法则、主定理
eventually nondecreaing:$f(n)$在自然数上非负,若
$\exists n{0}, \forall n{2} > n{1} \geqslant n{0}, f(n{2}) > f(n{1})$,
则为最终非递减
smooth:$f(n)$在自然数上非负、最终非递减,若
$f(2n) \in \Theta(f(n))$,则平滑
- 若$f(n)$平滑,则对任何整数b有$f(bn) \in \Theta(f(n))$
平滑法则
$T(n)$最终非递减,$f(n)$平滑,若$n=b^{k}(b>2)$时有
$T(n) \in \Theta(f(n))$,则$T(n) \in \Theta(f(n))$
主定理
$T(n)$最终非递减,满足递推式
若$f(n) \in \Theta(n^{d}), d \geqslant 0$,则
分析通用方案
- 决定衡量输入规模的参数
- 找出算法基本操作
- 检查算法基本操作执行次数是否只依赖于输入规模,如果和其他
特性有关,需要分别研究最差、最优、平均效率
- 建立算法基本操作执行次数的递推关系、相应初始条件
- 求解递推式,或至少确定其增长次数
算法时间效率极限
确定已知、未知算法效率极限
算法下界
算法下界是问题可能具有的最佳效率
Trivial Lower Bound
平凡下界:任何算法只要要“读取”所有要处理的项、“写”全部
输出,对其计数即可得到平凡下界
往往过小,用处不大
确定问题中所有算法都必须要处理的输入也是个障碍
例
生成n个不同项所有排列的算法$\in \Omega(n!)$,且下界
是紧密的,因为好的排列算法在每个排列上时间为常数
计算n次多项式值算法至少必须要处理所有系数,否则改变
任意系数多项式值改变,任何算法$\in \Omega(n)$
计算两个n阶方阵乘积算法$\in Omega(n^2)$,因为任何
算法必须处理矩阵中$2n^2$个元素
信息论下界:试图通过算法必须处理的信息量(比特数)建立
效率下界
例
- 猜整数中,整数的不确定信息量就是
$\lceil \log_2 n \rceil$(数字二进制位数),
n为整数上界
Adversary Lower Bound
敌手下界:敌手基于恶意、一致的逻辑,迫使算法尽可能多执行,
从而确定的为了保证算法正确性的下界
- 恶意使得它不断把算法推向最消耗时间的路径
- 一致要求它必须和已经做出的选择保持一致(按照一定规则)
例
猜整数中,敌手把1~n个数字作为可选对象,每次做出判断
后,敌手保留数字较多集合,使得最消耗时间、不违背之前
选择
两个有序列表${a_i}, {b_j}$归并排序中,敌手使用规则:
当前仅当i < j时,对$a_i < b_j$返回真(设置列表值大小
可以达到),则任何算法必须比较2n-1次,否则交换未比较
元素归并错误
问题化简
问题Q下界已知,考虑将问题Q转换为下界未知问题P,得到P下界
- 应该表明任意Q问题实例可以转换为P问题
- 即问题Q应该是问题P的子集,正确的算法至少应该能解决Q问题
决策树(二叉)
可以使用(二叉)决策树研究基于比较的算法性能
每个非叶子节点代表一次键值比较
叶子节点个数大于等于输出,不同叶子节点可以产生相同输出
对于特定规模为n的输入,算法操作沿着决策树一条从根到叶子
节点完成,所以最坏情况下比较次数等于算法决策树高度
如果树具有由输出数量确定叶子,则树必须由足够高度容纳叶子
,即对于任何具有$l$个叶子,树高度
$h \leqslant \lceil log_2 l \rceil$,这也就是
信息论下界
线性表排序
任意n个元素列表排序输出数量等于$n!$,所以任何基于比较的排序
算法的二叉树高度,即最坏情况下比较次数
归并排序、堆排序在最坏情况下大约必须要做$nlog_2n$次比较
,所以其渐进效率最优
也说明渐进下界$\lceil log_2n! \rceil$是紧密的
,不能继续改进
也可以使用决策树分析基于比较的排序算法的平均性能,即
决策树叶子节点平均深度
有序线性表查找
有序线性表查找最主要算法是折半查找,其在最坏情况下下效率
$C{worst}^{bs} = \lfloor log_2n \rfloor + 1 = \lceil log(n+1) \rceil$
折半查找使用的三路比较(小于、等于、大于),可以使用
三叉查找树表示
然而,事实上可以删除三叉查找树中间子树(等于分支),得到
一棵二叉树
更复杂的分析表明,标准查找假设下,折半查找平均情况比较
次数是最少的
- 查找成功时$log_2n - 1$
- 查找失败时$log_2(n+1)$
P、NP、完全NP问题
复杂性理论
如果算法的最差时间效率$\in O(p(n))$,$p(n)$为问题输入
规模n的多项式函数,则称算法能在多项式时间内对问题求解
Tractable:易解的,可以在多项式时间内求解的问题
Intractable:难解的,不能在多项式内求解的问题
使用多项式函数理由
无法保证在合理时间内对难解问题所有实例求解,除非问题实例
非常小
对实用类型的算法而言,其多项式次数很少大于3,虽然多项式
次数相差很大时运行时间也会有巨大差别
多项式函数具有方便的特性
多项式类型可以发展出Computational Complexity利用
- 该理论试图对问题内在复杂性进行分类
- 只要使用一种主要计算模型描述问题,并用合理编码方案
描述输入,问题难解性都是相同的
Decision Problem
判定问题:寻求一种可行的、机械的算法,能够对某类问题在有穷
步骤内确定是否具有某性质
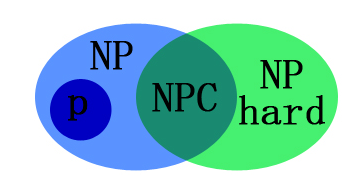
P、NP问题
P问题
Polynomial类型问题
NP问题
Nondeterministic Polynomial类型问题:可以用不确定多项式
算法求解的判定问题
NPC问题
NP Complete问题
- NP中其他任何问题(已知或未知)可以在多项式时间内化简为
NPC问题
NP-Hard问题
NP-Hard问题:所有NP问题都可以通过多项式规约到其
Reference
Polynomially Reducible
判定问题$D_1$可以多项式规约为判定问题$D_2$,条件是存在
函数t可以把$D_1$的实例转换为$D_2$的实例,满足
CNF-Satisfied Problem
合取范式满足性问题:能否设置合取范式类型的布尔表达式中布尔
变量值,使得整个表达式值为真