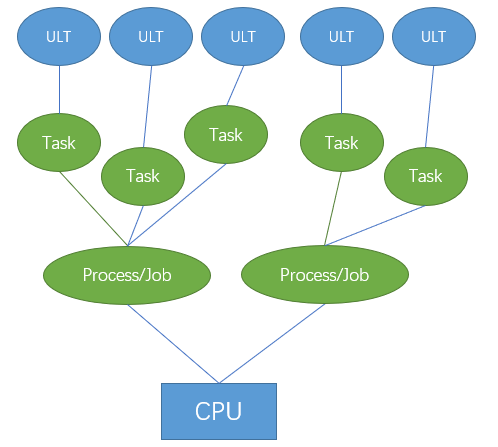
进程、线程、作业
Linux进程、线程
进程发展
Linux2.2内核
- 进程通过系统调用
fork()创建,新进程是原进程子进程 - 不存在真正意义上的线程
- 只默认允许4096个进程/线程同时运行
- 进程通过系统调用
Linux2.4内核
- 运行系统运行中动态调整进程数上限,进程数仅受制于物理 内存大小,最大16000
Linux2.6内核
- 进程调度重新编写,引入slab分配器动态生成
task_struct - 最大进程数量提升至10亿
- 线程框架重写
- 引入
tgid、线程组、线程各自的本地存储区 - 得以支持NPTL线程库
- 引入
- 进程调度重新编写,引入slab分配器动态生成
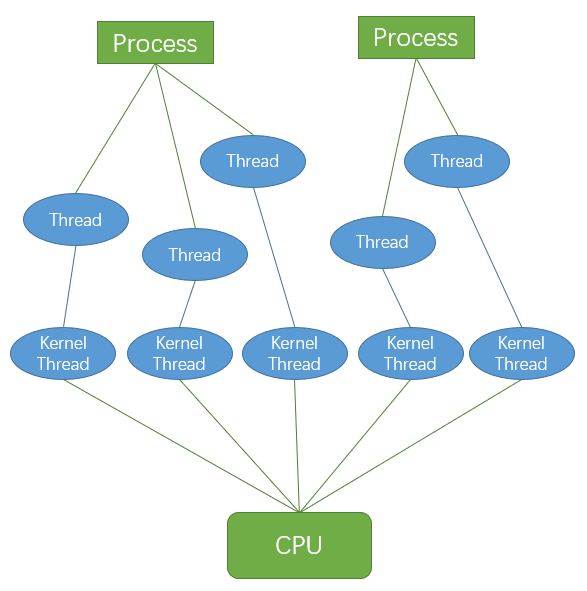
线程/轻量级进程
Linux未真正实现、区分线程,在内核层面是特殊进程,是 “真正的轻量级进程”
- “线程”和“进程”共享
- 相同调度策略,处于同一调度层次
- 相同数据结构进程标识符,位于相同进程标识符空间
- “线程”与“进程”的区别在于
- 线程没有独立的存储空间
- “线程”和“进程”共享
多线程即创建多个进程并分配相应的进程描述符
task_struct、指定其共享某些资源- 创建线程不会复制某些内存空间,较进程创建快
- 在专门线程支持系统多线程中,系统会创建包含指向所有 线程的进程描述符,各线程再描述独占资源
尽管Linux支持轻量级进程,但不能说其支持核心级线程
- 则不可能在Linux上实现完全意义上的POSIX线程机制
- 所以Linux线程库只能尽可能实现POSIX绝大部分语义,尽量 逼近功能
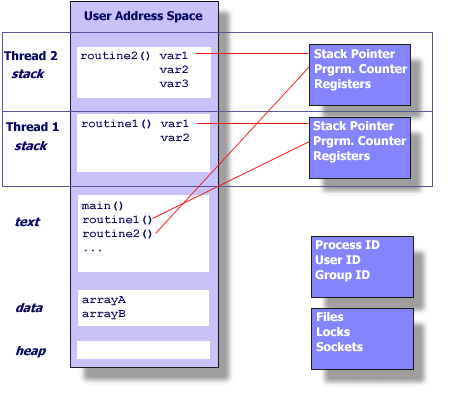
线程在进程内共享某些资源
- 打开的文件
- 文件系统信息
- 地址空间
- 信号处理函数
- 这里讨论的线程都是内核线程,即内核可感知、调度线程,不 包括程序自建线程
内核守护线程
| kthreads | pthreads | |
|---|---|---|
| 资源 | 无用户空间 | 共享完整虚拟寻址空间 |
| 状态 | 只工作在内核态 | 可在内核态、用户态之间切换 |
| 目的 | 维护内核正常工作 | 用户分配任务 |
内核守护线程:内核为维护正常运行创建、仅工作在内核态线程
按作用可以分类
- 周期性间隔运行,检测特定资源的使用,在用量超出或低于 阈值时采取行动
- 启动后一直等待,直到系统调用请求执行某特定操作
执行以下任务
- 周期性将dirty内存页与页来源块设备同步:
bpflush线程 - 将不频繁使用的内存写入交换区:
kswapd线程 - 管理延时动作:
kthreadd线程接手内核守护线程创建 - 实现文件系统的事务日志
- 周期性将dirty内存页与页来源块设备同步:
内核守护线程只能工作在内核态
- 没有用户空间,和内核共用一张内核页表
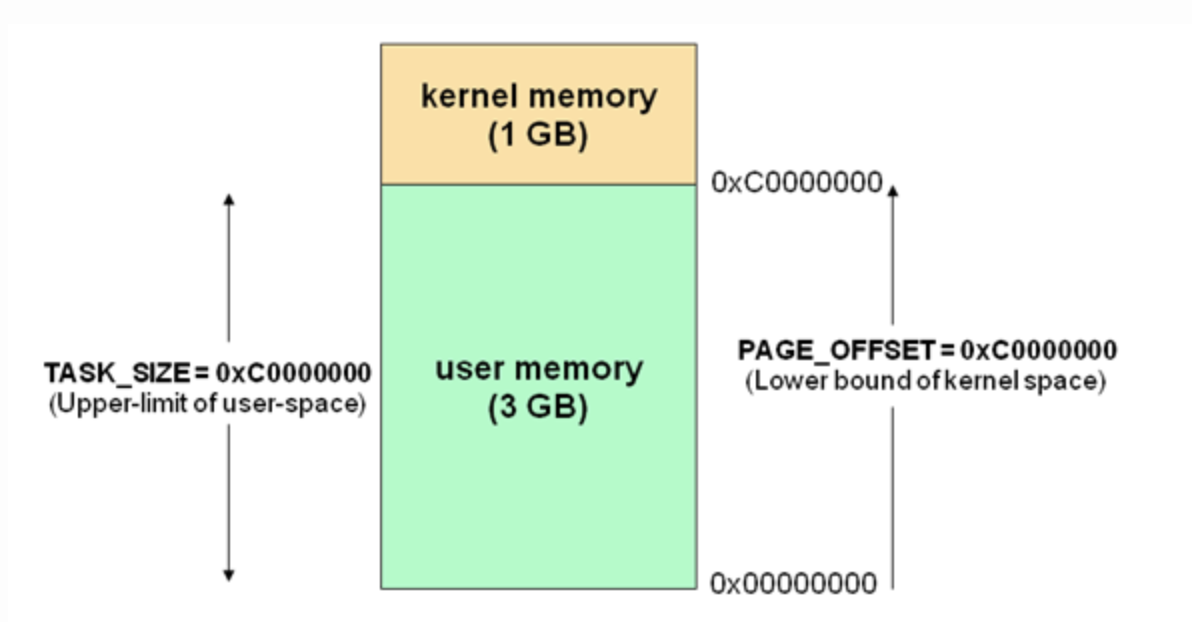
- 只能使用大于
PAGE_OFFSET部分的虚拟寻址空间,即进程 描述符中current->mm始终为空
- 对4G主存的X86_32机器,只能使用最后1G,而普通pthreads 可以使用完整虚拟寻址空间
- 内核守护线程名往往为
k开头、d结尾
特殊内核守护线程
- Linux内核启动的最后阶段,系统会创建两个内核线程
init:运行文件系统上一系列init脚本,并启动shell 进程- 是所有用户进程的祖先,pid为1
kthreadd:内核启动完成之后接手内核守护线程的创建- 内核正常工作时永不退出,是死循环,pid为2
- 载入内核模块时即需要调用其创建新内核守护线程
进程状态
1 | // <kernel/include/linux/sched.h> |
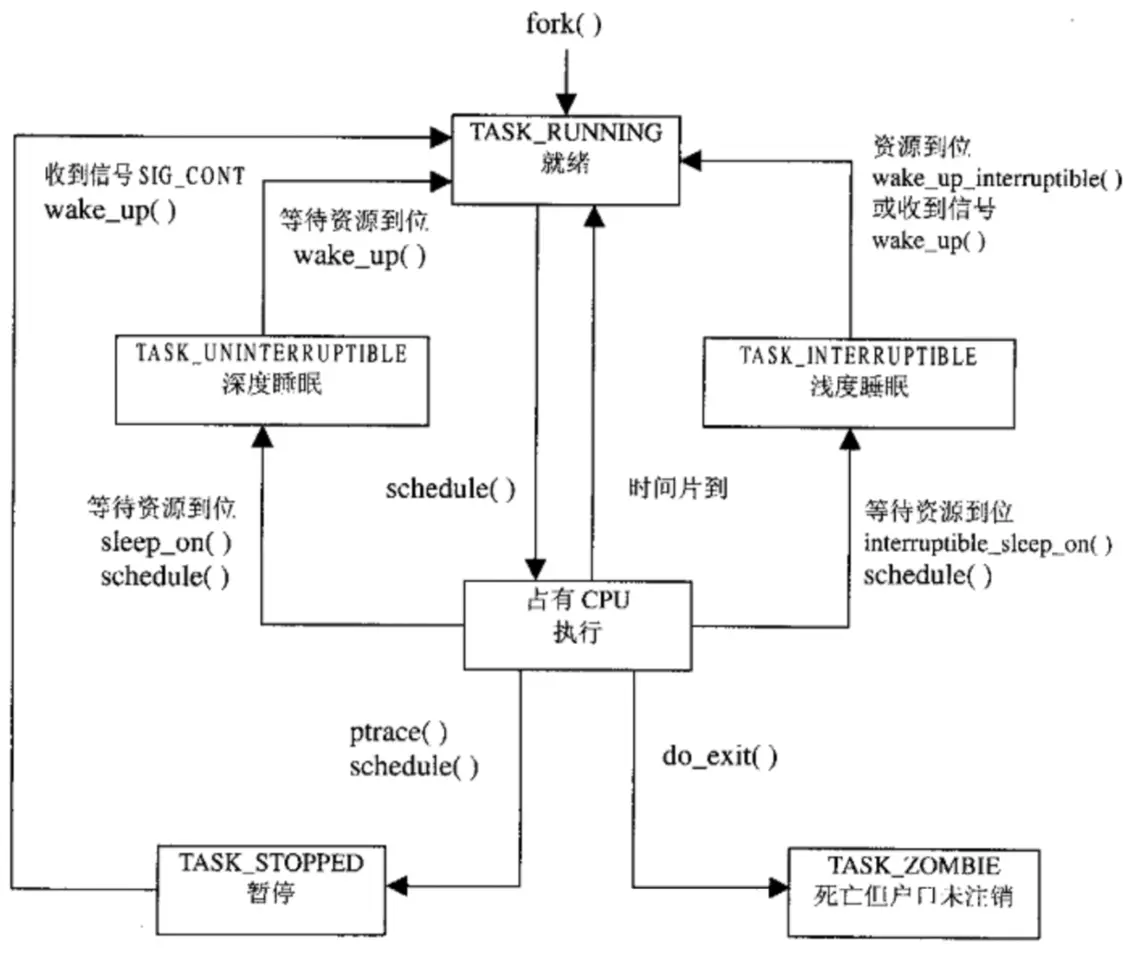
- 状态虽然有很多种,但总是
TASK_RUNNING -> 非, 即使进程在TASK_INTERRUPTIBLE状态被kill,也需要先唤醒 进入TASK_RUNNING状态再响应kill信号进入TASK_DEAD
TASK_RUNNING:可执行,正在执行或在运行队列中等待执行- 同一时刻可能有多个进程处于可执行态,位于运行队列中 等待进程调度器调度
TASK_INTERRUPTIBLE:正在阻塞,等待某些条件达成- 条件达成后内核会把进程状态设置为运行
- 此状态进程也会因为接收到信号而提前唤醒准备运行
- 系统中大部分进程都此状态
TASK_UNINTERRUPTILBE:不响应异步信号,即使接收到信号 也不会被唤醒或准备投入运行- 不可中断是指进程不响应异步信号,而不是指CPU不响应 中断
- 内核某些处理流程是不可被打断的,如:内核和硬件设备 交互被打断会导致设备进入不可控状态,因此需要此状态
__TASK_TRACED:被其他进程跟踪- 开发中进程停留在断点状态就是此状态,如:通过
ptrace对调试程序进行跟踪 - 此状态进程只能等待调试进程通过
ptrace系统调用执行PTRACE_CONT、PTRACE_DETACH等操作才能恢复到TASK_RUNNING状态
- 开发中进程停留在断点状态就是此状态,如:通过
__TASK_STOPPED:停止执行,没有也不能投入运行- 通常发生在接收到
SIGSTOP、SIGSTP、SIGTTIN、SIGTTOU等信号 - 向此状态进程发送
SIGCONT信号可以让其恢复到TASK_RUNNING状态
- 通常发生在接收到
TASK_DEAD:退出状态,即将被销毁EXIT_ZOMBIE/TASK_ZOMBIE:进程已结束但task_struct未 注销- 进程退出过程中处于
TASK_DEAD状态,进程占有的资源将 被回收,但父进程可能会关心进程的信息,所以task_struct未被销毁
- 进程退出过程中处于
内核态、用户态
系统设计角度:为不同的操作赋予不同的执行等级,与系统相关 的特别关键的操作必须有最高特权程序来完成
- 运行于用户态:进程可执行操作、可访问资源受到限制
- 运行于内核态:进程可执行任何操作、使用资源无限制
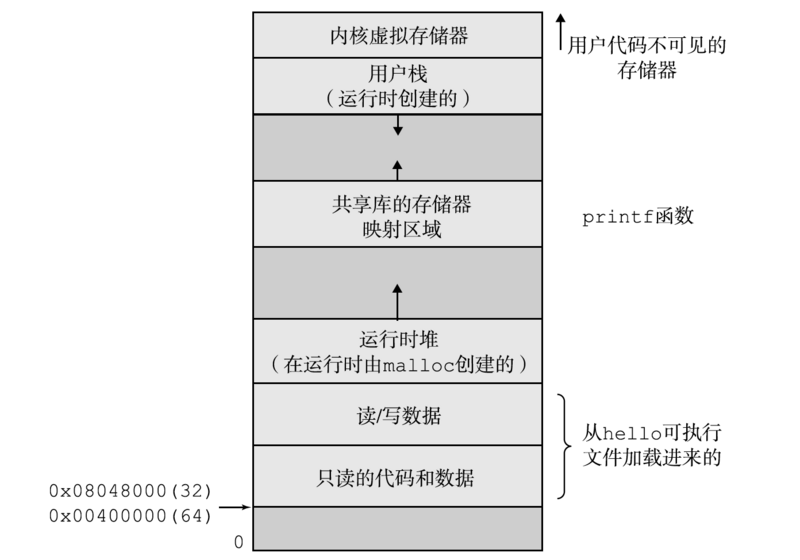
内存使用角度(虚拟寻址空间,X86_32位系统,最大4GB主存)
- 内核空间:最高的1G,所有进程共享
- 包含系统堆栈:2页面,即8K内存,低地址中存放
task_struct值 - 进程运行于内核空间时使用系统堆栈、处于内核态
- 包含系统堆栈:2页面,即8K内存,低地址中存放
- 用户空间:剩余3G
- 包含用户堆栈
- 进程运行于用户空间时使用用户堆栈、处于用户态
- 内核空间:最高的1G,所有进程共享
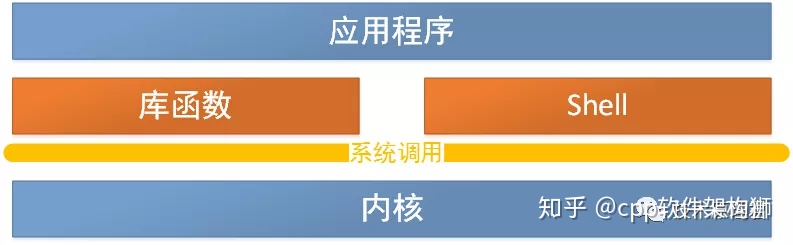
内核态的逻辑
- 进程功能和内核密切相关,进程需要进入内核态才能实现 功能
- 应用程序在内核空间运行、内核运行于进程上下文、陷入 内核空间,这种交互方式是程序基本行为方式
用户态进入内核态的方式
- 系统调用,如:
printf函数中就是调用write函数 - 软中断,如:系统发生异常
- 硬件中断,通常是外部设备的中断
- 系统调用,如:
进程或者CPU在任何指定时间点上活动必然为
- 运行于用户空间,执行用户进程
- 运行于内核空间,处于进程上下文,代表某特定进程执行
- 运行于内核空间,处于中断上下文,与任何进程无关,处理 特点中断
Linux进程数据结构
task_struct
1 | // <kernel/include/linux/sched.h> |
内核使用任务队列(双向循环链表)维护进程(描述符)
task_struct:进程描述符,包含进程的所有信息,包括- 进程状态
- 打开的文件
- 挂起信号
- 父子进程
ID
pid:字面意思为process id,但逻辑上为线程IDtgid:字面意思为thread group id,但逻辑上为 进程ID
1 | // <kernel/timer.c> |
线程关系
1 | // <kernel/fork.c> |
线程组退出
1 | // <kernel/exit.c> |
Slab分配器

slab分配器把不同对象类型划分为不同高速缓存组,如:
task_struct、inode分别存放- 高速缓存又会被划分为slab
- slab由一个或多个物理上连续的页组成
申请数据结构时
- 先从半满的slabs_partial中申请
- 若没有半满,就从空的slabs_empty中申请,直至填满 所有
- 最后申请新的空slab
slab分配器策略优点
- 减少频繁的内存申请和内存释放的内存碎片
- 由于缓存,分配和释放迅速
thread_info
1 | // <asm/thread_info.h> |
- 内核中对进程操作都需要获得进程描述符
task_struct指针, 所以获取速度非常重要- 寄存器富余的体系会拿出专门的寄存器存放当前
task_struct的指针 - 寄存器不富余的体系只能在栈尾创建
thread_info结构, 通过计算间接查找
- 寄存器富余的体系会拿出专门的寄存器存放当前
进程创建
- 继承于Unix,Linux进程创建使用两个函数分别完成,其他如Win 可能都是通过一个方法完成
fork函数:拷贝当前进程创建子进程- 子进程、父进程区别仅在于PID、PPID和少量资源
exec函数(族):载入可执行文件至地址空间开始运行
1 | SYSCALL_DEFINE0(fork){ |
fork、vfork最终都是通过调用_do_fork实现,仅传参 不一致- 首个参数为
clone_flags,最终被copy_process用于 真正的拷贝执行
- 首个参数为
通过系统调用
clone()创建线程同创建进程系统调用
fork()、vfork()一样,最终调用do_fork方法,但传递和进程创建时不同的flag,指明 需要共享的资源1
CLONE_VM | CLONE_FS | CLONE_FILES | CLONE_SIGNAND
fork
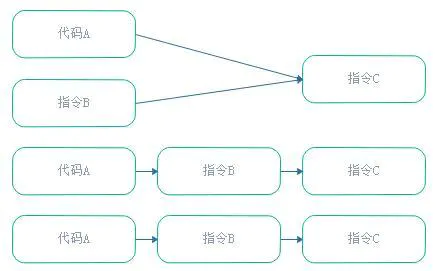
fork():子进程是父进程的完整副本,复制了父进程的资源,
包括内存内容、task_struct
子进程拷贝父进程的数据段、代码段
- 同一变量的虚拟地址相同(物理地址不同)
利用copy-on-write优化效率
- 内核创建子进程时不复制父进程的地址空间,而是只读共享 父进程空间数据
- 只有子进程需要写数据时才会拷贝到子进程
- 页表:存放给从逻辑页号到物理页帧/块号地址的映射
Unix傻瓜式进程创建
内核原样复制父进程整个地址空间,并分配给子进程,效率低
- 为子进程页表分配页帧
- 为子进程页分配页帧
- 初始化子进程页表
- 把父进程页复制到子进程相应页中
大部分情况下复制父进程页无意义
- 子进程会载入新的程序开始运行
- 丢弃所继承的地址空间
Copy-on-Write
copy-on-write思想简单:父进程、子进程共享页帧
共享页帧不能被修改,父进程、子进程试图写共享页帧时产生
page_fault异常中断CPU执行异常处理函数
do_wp_page()解决此异常- 对导致异常中断的页帧取消共享操作
- 为写进程复制新的物理页帧,使父、子进程各自拥有内容 相同的物理页帧
- 原页帧仍然为写保护:其他进程试图写入时,内核检查进程 是否是页帧的唯一属主,如果是则将页帧标记为对此进程 可写
异常处理函数返回时,CPU重新执行导致异常的写入操作指令
- copy-on-write:多个呼叫者同时要求相同资源时,会共同 取得相同指针指向相同资源,直到某个呼叫者尝试修改资源时, 系统才给出private copy,避免被修改资源被直接察觉,此 过程对其他呼叫者transparent
vfork
vfork():子进程直接共享父进程的虚拟地址空间、物理空间
vfork被设计用以启动新程序- 内核不创建子进程的虚拟寻址空间结构
- 进程创建后应立即执行
exec族系统调用加载新程序,替换 当前进程
exec不创建新进程,仅用新程序替换当前进程正文、 数据、堆、栈
在子进程调用
exec函数族、_exit()、exit()前,子进程 在父进程的地址空间中运行- 二者共享数据段,子进程可能破坏父进程数据结构、栈
- 父进程地址空间被占用,因此内核会保证父进程被阻塞,
即
vfork会保证子进程先运行
应确保一旦调用
vfork后- 子进程不应使用
return返回调用处,否则父进程又会vfork子进程 - 子进程不应依赖父进程进一步动作,否则会导致死锁
- 子进程需避免改变全局数据
- 若子进程改变了父进程数据结构就不能调用
exit函数
- 子进程不应使用
clone
clone:可有选择地继承父进程资源
1 | int clone(int (fn)(void), void * child_stack, int flags, void * args); |
clone通过众多参数有选择地创建进程- 创建LWP/线程
- 创建兄弟进程
- 类似
vfork创建和父进程共享虚拟寻址空间
参数说明
fn:函数指针child_stack:为子进程分配的系统堆栈空间flags:描述需要从父进程继承的资源,如下args:传给子进程的参数
Flags
1 |
线程库
- POSIX标准要求:线程不仅仅是共享资源即可,其需要被视为
整体
- 查看进程列表时,一组
task_struct需要被展示为列表中 一个节点 - 发送给进程信号,将被一组
task_struct共享,并被其中 任意一个线程处理 - 发送给线程信号,将只被对应
task_struct接收、处理 - 进程被停止、继续时,一组
task_struct状态发生改变 - 进程收到致命信号
SIGSEGV,一组task_struct全部退出
- 查看进程列表时,一组
LinuxThread线程库
LinuxThread线程库:Linux2.6内核前,pthread线程库对应实现
- 特点
- 采用1对1线程模型
- 通过轻量级进程模拟线程
- 线程调用由内核完成,其他线程操作同步、取消等由核外 线程库完成
- 仅通过管理线程实现POSIX以上5点要求中最后一点
管理线程
管理线程:为每个进程构造、负责处理线程相关管理工作
管理线程是主线程的首个子线程
- 进程首次调用
pthread_create创建线程时会创建、启动 管理线程
- 进程首次调用
管理线程负责创建、销毁除主线程外线程,成为LinuxThread 的性能瓶颈
- 从pipe接收命令创建线程
- 子线程退出时将收到
SIGUSER1信号(clone时指定), 若不是正常退出,则杀死所有子线程并自杀 - 主循环中不断检查父进程ID,若为1说明原父线程退出并 被托管给init线程,则杀死所有子进程并自杀
通过LWP模拟线程存在的问题
- LWP不共享进程ID
- 某些缺省信号难以做到对所有线程有效,如:
SIGSTOP、SIGCONT无法将整个进程挂起 - 线程最大数量收到系统总进程数限制
- 管理线程是性能瓶颈,一旦死亡需要用户手动清理线程、 无人处理线程创建请求
- 同步效率低,通过复杂的信号处理机制进行同步
- 与POSIX兼容性差
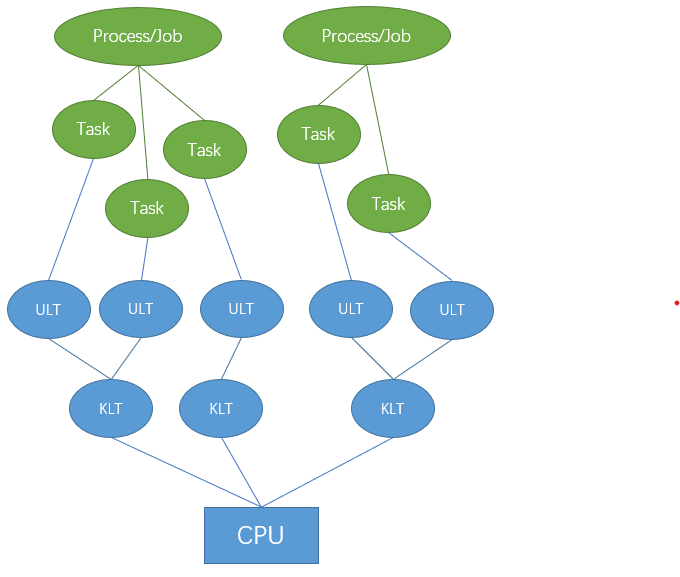
Naive POSIX Thread Library
NPTL:Linux2.6内核重写线程框架的基础上引入的pthread线程库
本质上还是利用LWP实现线程的1对1线程模型,但结合新的线程 框架实现了POSIX的全部5点要求
- 线程组
tgid引入体现task_struct代表进程还是线程 task_struct维护两套signal_pending- 线程组共享signal_pending:存放
kill发送信号, 任意线程可以处理其中信号 - 线程独有signal_pending:存放
pthread_kill发送 信号,只能由线程自身处理
- 线程组共享signal_pending:存放
- 收到致命信号时,内核会将处理动作施加到线程组/进程中
- 线程组
但也存在一些问题
kill未展示的LWP会杀死整个进程
- RedHat开发,性能远高于LinuxThreads,需要内核支持
Next Generation Posix Threads for Linux
NGPT:基于GNU Portable Threads项目的实现多对多线程模型
- IBM开发,性能介于LinuxThread、NPTL间,2003年终止开发