Long Short Term Memory
Long Short Term Memory
LSTM:通过刻意设计、默认可以学习长期依赖信息的RNN网络

LSTM中每个重复的模块(层)称为细胞
- 细胞结构经过特殊设计,相较于准RNN简单细胞结构能较好 保留长时信息
多个LSTM细胞可以组成block,其中细胞门权值共享
- block中各个细胞状态不同
- 这个是同时刻、不同层的真权值共享,类似CNN中的卷积核
- 减少参数个数,效率更高
- long term memory:长期记忆,参数
- short term memory:短期记忆,数据流
- long short term memory:长[的]短期记忆,细胞状态
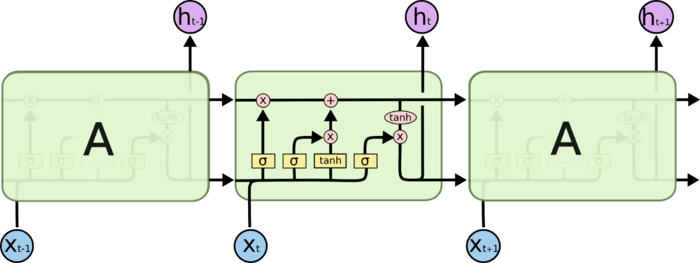
LSTM标准细胞结构
- $W_i, b_i, W_f, b_f, W_o, b_o$:输入门、遗忘门、输出门 参数
- $\odot$:逐项乘积
- $x_t$:第$t$期输入
- $i^{(t)}$:输出门权重,决定需要更新的信息
- $f^{(t)}$:遗忘门权重,决定需要遗忘的信息
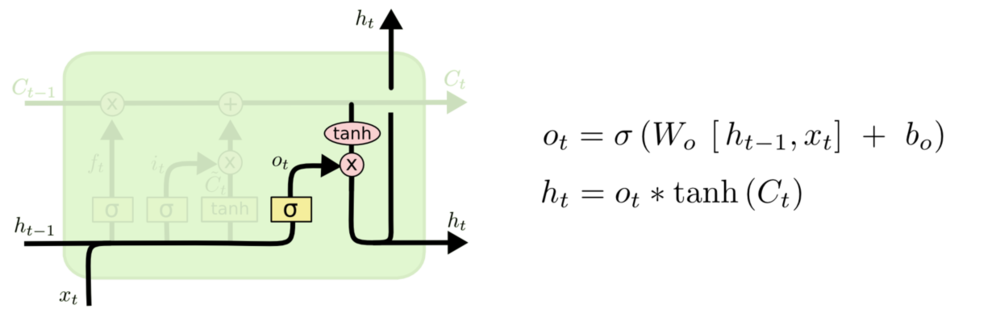
- $o^{(t)}$:输出门权重,决定需要输出的信息
- $h^{(t-1)}$:第$t-1$期细胞状态输出
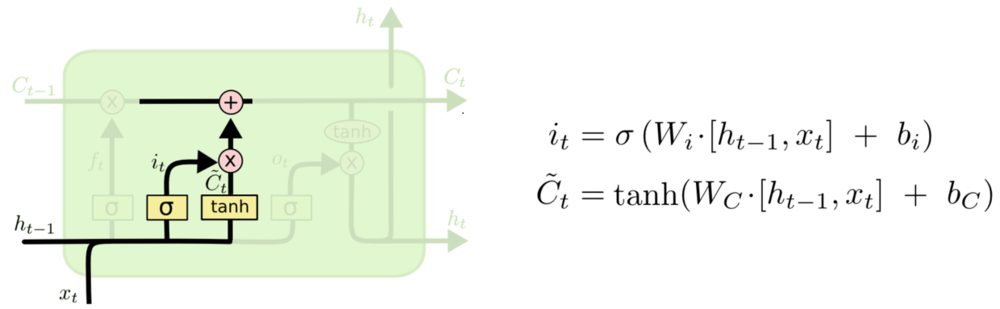
- $\tilde C_t$:第$t$期更新备选内容
- $C^{(t)}$:第$t$期更新完成后细胞状态
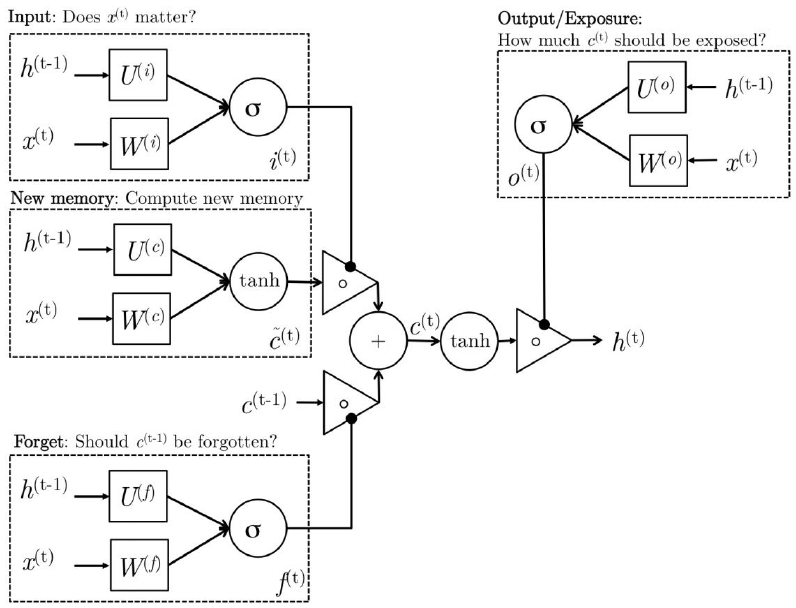
输入、遗忘、输出门特点
- 当期输入$x^{(t)}$、上期输出$h^{(t-1)}$作为输入
- sigmoid作为激活函数,得到$[0,1]$间控制、权重向量
- 1:完全保留
- 0:完全舍弃
细胞状态、输出特点
- tanh作激活函数,得到$[-1,1]$间信息向量
- $h^{(t-1)}, x^t$:备选更新信息输入
- $C^{(t-1)}$:输出信息输入
- 与门限权重逐项乘积确定最终遗忘、输入、输出
- 细胞状态选择(候选、输出)都是使用双曲正切激活,应该 是为了有正由负
- tanh作激活函数,得到$[-1,1]$间信息向量
Gates
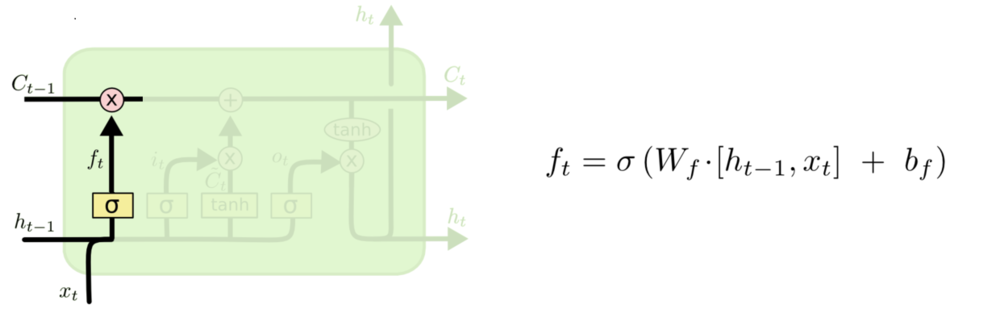
Forget Gate:遗忘门,决定要从细胞状态中舍弃的信息
Input Gate:输入门,决定向细胞状态中保留的信息
Ouput Gate:输出门,决定从细胞状态中输出的信息
Cell State
细胞状态:LSTM中最重要的核心思想
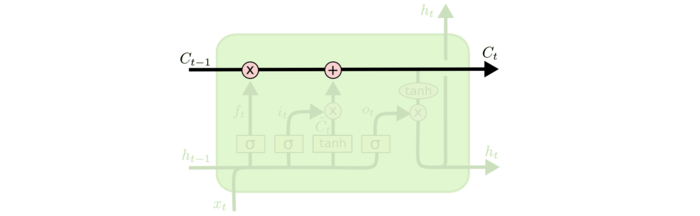
随着时间流动,承载之前所有状态信息,代表长期记忆
- 类似于传送带,直接在整个链上运行,只有少量线性交互
- 信息其上流派很容易保持不变
- 通过“三个门”保护、控制
LSTM可以保证长短时记忆可以理解为
- $C_t$中历史信息比重由$f^{(t)}$确定
- $f^{(t)}$趋近于1时历史信息能较好的保留
Gated Recurrent Unit

- $W_r, b_r, W_z, b_z$:重置门、更新门参数
- $h^{(t)}$:原细胞状态、隐层输出合并
- $\tilde{h}_t$:第$t$期更新备选信息
- $r^{(t)}$:重置门权重输出,重置上期状态$h_{t-1}$再作为更新 门输入
- $z^{(t)]$:更新门权重输出,当期状态$ht$中$h{t-1}$、 $\tilde{h}_t$占比(遗忘、更新的结合)
- 合并细胞状态、隐层输出
- 合并遗忘门、输出门为更新门
其他变体结构
Vanilla LSTM
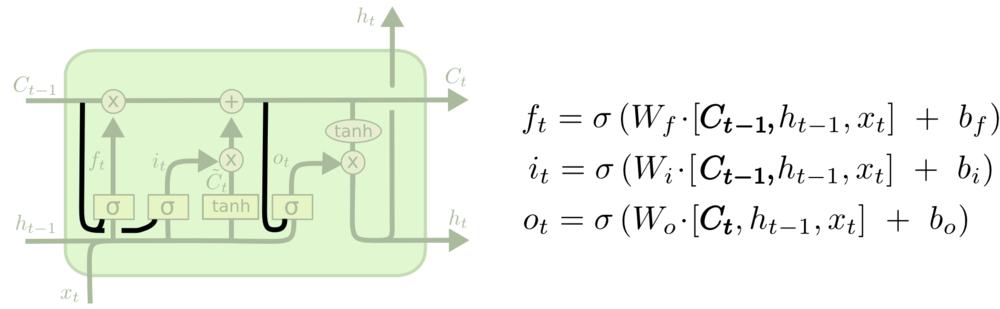
- Peephole Connection:细胞状态也作为3个门中sigmoid的 输入,影响控制向量的生成
Coupled Input and Forget Gate
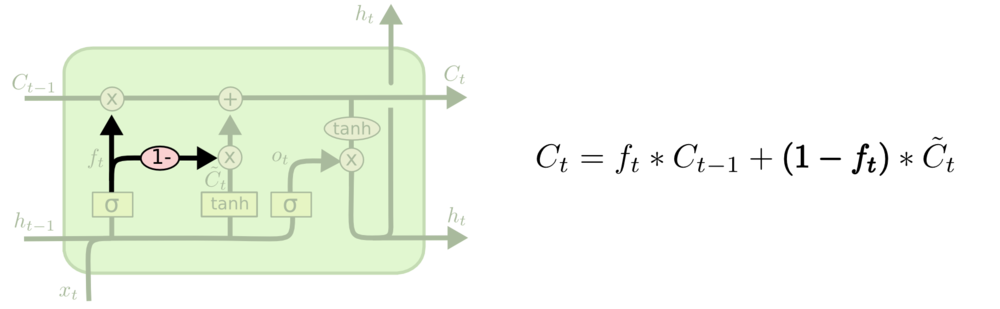
- $1-f_i$代替$i_t$,结合遗忘门、输入门
结构比较
在Vanilla LSTM基础上的8个变体在TIMIT语音识别、手写字符识别、 复调音乐建模三个应用中比较
- No Input Gate:NIG,没有输入门
- No Forget Gate:NFG,没有遗忘门
- No Output Gate:NOG,没有输出门
- No Input Acitivation Function:NIAF,输入门没有tanh 激活
- No Output Activation Function:NOAF,输出门没有tanh 激活
- No Peepholes:NP,普通LSTM
- Coupled Input and Forget Gate:CIFG,遗忘、输出门结合
- Full Gate Recurrence:FGR,所有门之间有回路
Vanilla LSTM效果均良好,其他变体没有性能提升
细胞结构
- 遗忘门、输入门是最重要的部分
- 遗忘门对LSTM性能影响十分关键
- 输出门对限制无约束细胞状态输出必要
- CIFG、NP简化结构,单对结果没有太大影响
- 遗忘门、输入门是最重要的部分
超参
- 学习率、隐层数量是LSTM主要调节参数
- 两者之间没有相互影响,可以独立调参
- 学习率可以可以使用小网络结构独立校准
- 动量因子影响不大
- 高斯噪声的引入有损性能、增加训练时间
- 学习率、隐层数量是LSTM主要调节参数
?时间