统计量 - 熵
Entropy
- (信息)熵:在概率分布上对复杂程度/多样性/不确定性/混乱程度的度量
- $p_d$:随机变量各取值对应概率
- 事件 $i$ 发生概率 $p_d=0$:约定 $p_d log(p_d)$ 为 0
- 其中 $log$ 以 2 为底,单位为 bit,以 $e$ 为底,单位为 nat
信息论中,熵越高能传输越多信息
- 可携带的信息量 = 单位消息熵 * 消息长度
- 熵衡量系统复杂程度,提高系统确定性即削弱系统多样性,降低熵
概率分布包含的信息即其复杂程度(可能取值数量)
- 考虑按照 $(p_1,\cdots,p_D)$ 分布、长度为 $N$ 的随机变量序列,其可能排列数为 $\frac {N!} {\prod_d^D (p_d N)!}$
则根据 Stirling 公式有
则长度为 $N$ 的随机变量串的多样性、信息量为 $H * N$,其中 $H=\sum_d^D p_d log p_d$ 概率分布的信息熵
某个事件包含的信息可以用编码长度理解
- 对概率 $p$ 事件,编码 $1/p$ 个需编码(2进制编码)长度 $log_2 \frac 1 p$
- 则概率 $p$ 事件包含信息量可以定义为 $log \frac 1 p$,即事件包含的信息量可用表示事件需要编码的长度表示 (底数则取决于编码元,只影响系数)
- 则整个随机变量的信息为各事件信息量加权和
熵可以视为变量取值概率的加权和
- 只依赖随机变量 $X$ 的分布,与其取值无关,可将其记为 $H(P)$
- 由定义 $0 \leq H(P) \leq log_2 k$
- $H(p) = 0$:$\exists j, p_j=1$,随机变量只能取一个值,无不确定性
- $H(p) = log k$:$\forall j, p_j=1/k$,随机变量在任意取值概率相等,不确定性最大
- empirical entropy:经验熵,熵中的概率由数据估计时(尤极大似然估计)
- 参考链接
- Stirling 公式即用积分近似计算 $\sum logn$:https://zhuanlan.zhihu.com/p/143992660
熵的性质
对称性:事件取值不影响熵
极值性
所有符号有同等机会出现的情况下,熵达到极大(琴生不等式)
仅有一个符号确定出现的情况下,熵达到极小 0
Continuity连续性:度量连续,概率微小变化只能引起熵微小变化
Normalization规范化:$H_2(\frac 1 2, \frac 1 2) = 1$
Grouping组合法则/可加和性:熵与过程如何划分无关 (此即要求熵形式为对数)
若子系统间相互作用已知,则可以通过子系统熵值计算系统整体熵
- $X_1,\cdots,X_K$:$K$ 个子系统,可以理解为将随机变量 $X$ 划分为 $K$ 种情况
- $H(X_1,\cdots,X_K)$:子系统相互作用熵
- 子系统相互作用熵可以认为是,通过已知信息消除的多样性(即信息增益)
- 子系统熵之和则是利用已知信息消除多样性之后,系统剩余混乱程度
一般的,两个事件 $X,Y$ 熵满足以下计算关系
特别的,若事件 $X, Y$ 相互独立
- 满足以上特性的熵定义必然为如下形式
$$
-K \sum P(x)log(P(x))
$$
- 在热力学、信息论等领域,熵有多种不同定义,满足熵性质的测度泛函,只能具有(Shannon 熵和 Hartley 熵)或(von Neumann 熵和 Shannon 熵)线性组合的函数形式,若不要求满足组合法则,还有 Tsallis 熵等
Conditinal Entropy
条件熵:随机变量 $X$ 给定条件下,随机变量 $Y$ 的条件概率分布的熵对 $X$ 的数学期望
- $P(X=xi, Y=y_j)=p{i,j}$:随机变量 $(X,Y)$ 联合概率分布
- $p_i=P(X=x_i)$
- $H(Y|X=x_i)$:后验熵
特别的,考虑数据集 $D$ 被分为 $D_1,\cdots,D_m$,条件经验熵可计算如下
- postorior entropy:后验熵,随机变量 $X$ 给定条件下,随机变量 $Y$ 的条件概率分布的熵
- empirical conditional entropy:经验条件熵,概率由数据估计
Infomation Gain/Mutual Infomation
互信息/信息增益:(经验)熵与(经验)条件熵之差
与数据集具体分布有关、与具体取值无关
- 绝对大小同易受熵影响,(经验)熵较大时,互信息也相对较大
- 由于误差存在,分类取值数目较多者信息增益较大
可衡量变量 $X$ 对 $Y$ 预测能力、减少不确定性的能力
- 信息增益越大,变量之间相关性越强,自变量预测因变量能力越强
- 只能考察特征对整个系统的贡献,无法具体到特征某个取值
- 只适合作全局特征选择,即所有类使用相同的特征集合
Infomation Gain Ratio
信息增益比:信息增益对原始信息熵的比值
- 考虑熵大小,减弱熵绝对大小的影响
Cross Entropy
- 信息论:基于相同事件测度的两个概率分布 $P, Q$,基于非自然(相较于真实分布 $P$)概率分布 $Q$ 进行编码,在事件集合中唯一标识事件所需 bit
- 概率论:概率分布 $P, Q$ 之间差异
- $P(x), Q(x)$:概率分布(密度)函数
- $r(x)$:测度,通常是 $Borel \sigma$ 代数上的勒贝格测度
- $D_{KL}(P||Q)$:$P$ 到 $Q$ 的 KL 散度($P$ 相对于 $Q$ 的相对熵)
- 信息论中,交叉熵可以看作是信息片段在错误分布 $Q$ 分布下的期望编码长度
- 信息实际分布实际为 $P$,所以期望基于 $P$
- 交叉熵是常用的损失函数:效果等价于 KL 散度,但计算方便
- sigmoid 激活函数时:相较于二次损失,收敛速度更快
Entropy 衍生指标
Kullback-Leibler Divergence
KL 散度/相对熵:衡量概率分布 $P, Q$ 之间差异的量化指标
KL 散度含义
- 原始分布 $P$、近似分布 $Q$ 之间对数差值期望
- 若使用观察分布 $Q$ 描述真实分布 $P$,还需的额外信息量
KL 散度不对称,分布 $P$ 度量 $Q$、$Q$ 度量 $P$ 损失信息不同
- 从计算公式也可以看出
- KL散度不能作为不同分布之间距离的度量
Population Stability Index
PSI:衡量分布 $P, Q$ 之间的差异程度
- 是 KL 散度的对称操作
- 更全面的描述两个分布的差异
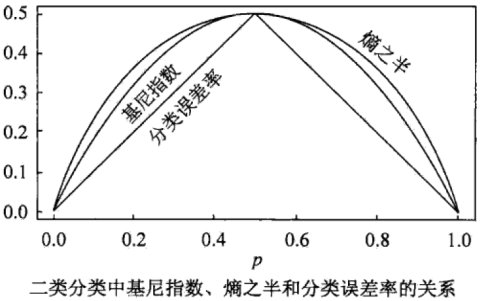
Gini 指数
基尼指数:可视为信息熵的近似替代
- $p$:概率分布
- 异质性最小:Gini 系数为 0
- 异质性最大:Gini 系数为 $1 - \frac 1 k$
- Gini 指数度量分布的不纯度
- 包含类别越多,Gini 指数越大
- 分布越均匀,Gini 指数越大
- 熵较 Gini 指数对不纯度判罚更重
- 经济学领域的 Gini 系数更类似 AUC 值
与 Entropy 关系
- Gini 指数可以视为是熵在 1 附近的一阶泰勒展开近似
条件 Gini 指数
- 性质类似信息增益