Fenchel-Legendre Duality
Legendre Transformation
勒让德变换:用 $f^{ * }(p)$ 表示凸、可导函数 $f(x)$ 的变换,其中 $p$ 是 $f(x)$ 导数
- $x$:参数,满足 $\frac {d(p^T x - f(x))} {dx} = 0$,随 $p$ 取值改变
- 可导:有导数;凸:导数唯一
- 勒让德变换是实变量的实值凸函数的对合变换
- 把定义在线性空间上的函数变换至对偶空间的函数
- 是点、(切)线之间对偶关系的应用
- 严格凸函数中,切线、导数一一对应
- 函数关系 $f(x)$ 可使用 $(x, y=f(x))$ 点集表示,也可用切线集合表示
- involution 对合:对合函数 $f$ 的反函数的为自身,即 $f(f(x))=x$;对合线性变换 $V$ 满足 $V^2 = E$
Legendre 变换理解(按 Fenchel 共轭)
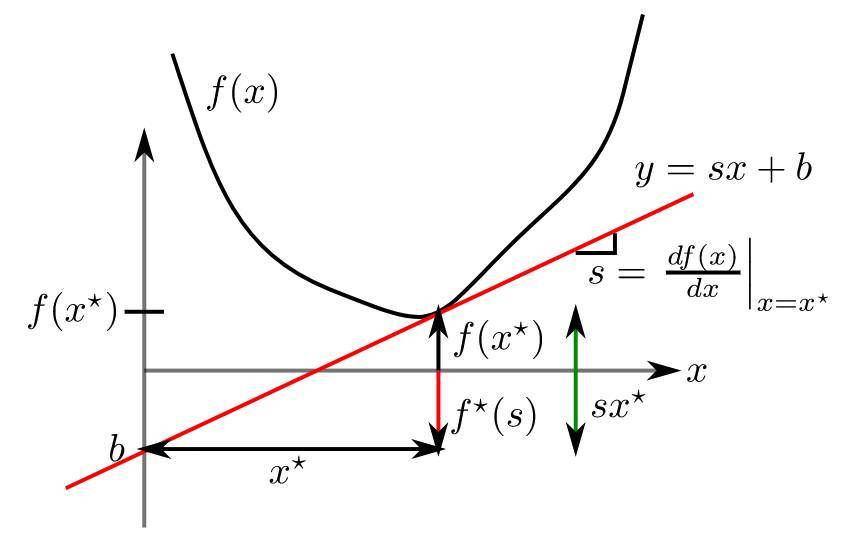
$f^{*}(p)$:可理解为斜率为 $p$、同 $f(x)$ 有交点 $x_0$ 的直线在零点处值(截距)和 $f(x_0)$ 的最大差
$x$:可以理解为函数 $f(x)$ 上距离给定斜率为 $p$、过原点的直线 $f(x)=px$ 竖直距离最大的点
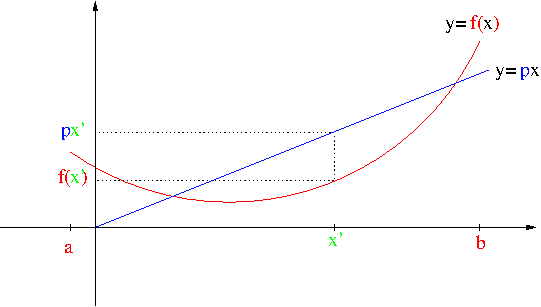
- 类似一个端点为 $0$ 的 Bregman 散度
Legendre 变换为对合变换,进行两次的变换得到原函数
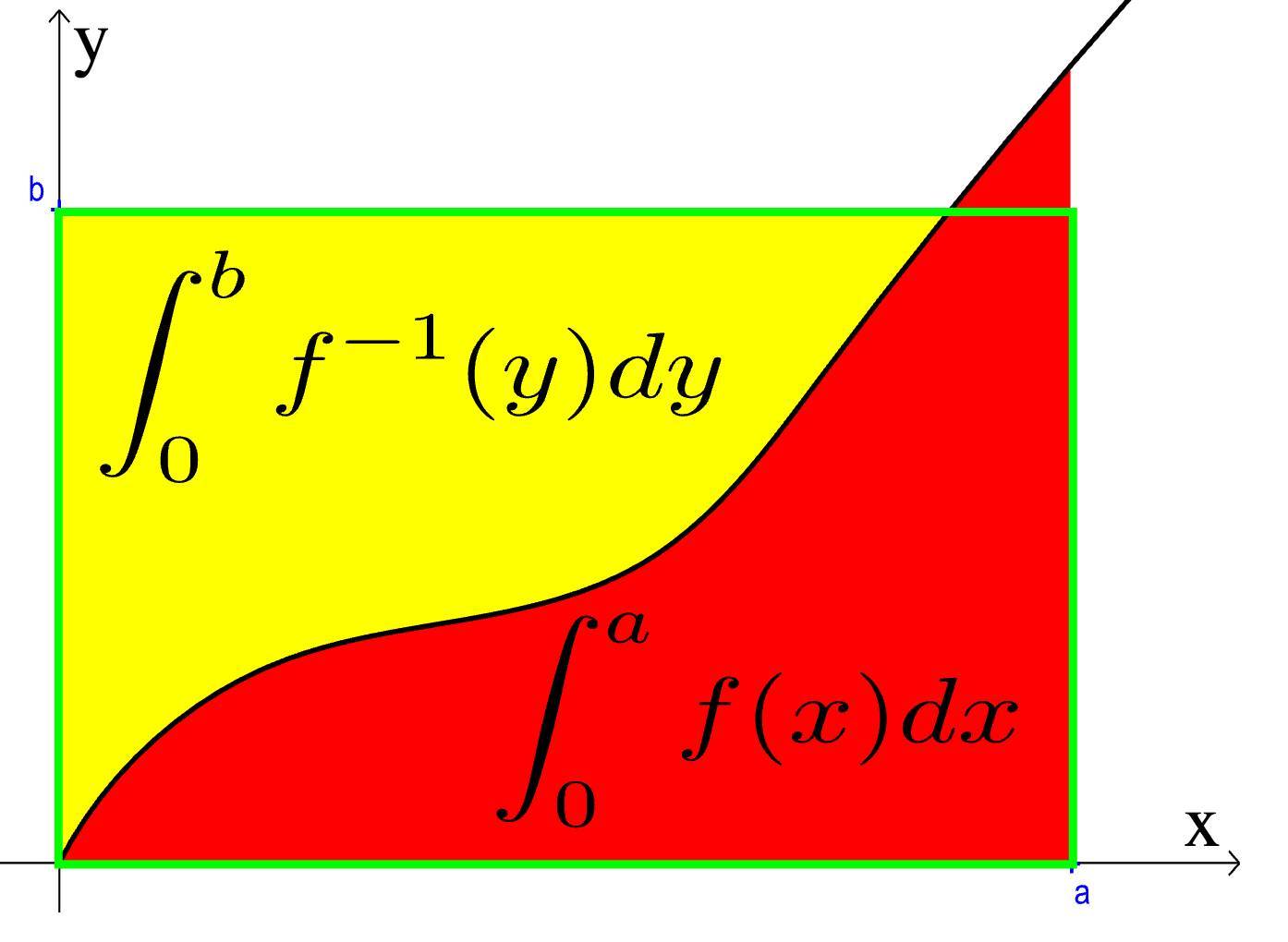
若视凸函数 $f(x)$ 视为积分,则其共轭 $f^{ * }(x)$ 为对另一轴积分,二者导函数互为反函数
- 以上性质均按 Fenchel 共轭,但要求 $f(x)$ 为凸、可导函数,故等价于 Legendre 变换
Legendre 变换最大值式定义
- Legendre 变换可以视为寻找 $px-f(x)$ 最大值(如前述)
- $f(x)$ 为凸函数,则 $p=\frac {df(x)} {dx}$ 是最大值点
- 则将 $f(x)$ 导函数的反函数 $x=f^{-1}(p)$ 带入即可
Legendre 变换数学性质
标度性质
由此,$r$次齐次函数的勒让德变换是$s$次齐次函数,满足
平移性质
反演性质
线性变换性质
- $f$:$R^n$上的凸函数
- $A$:$R^n \rightarrow R^m$的线性变换
- $A^{}: <Ax, y^{}> =
Fenchel Conjugate / 凸共轭
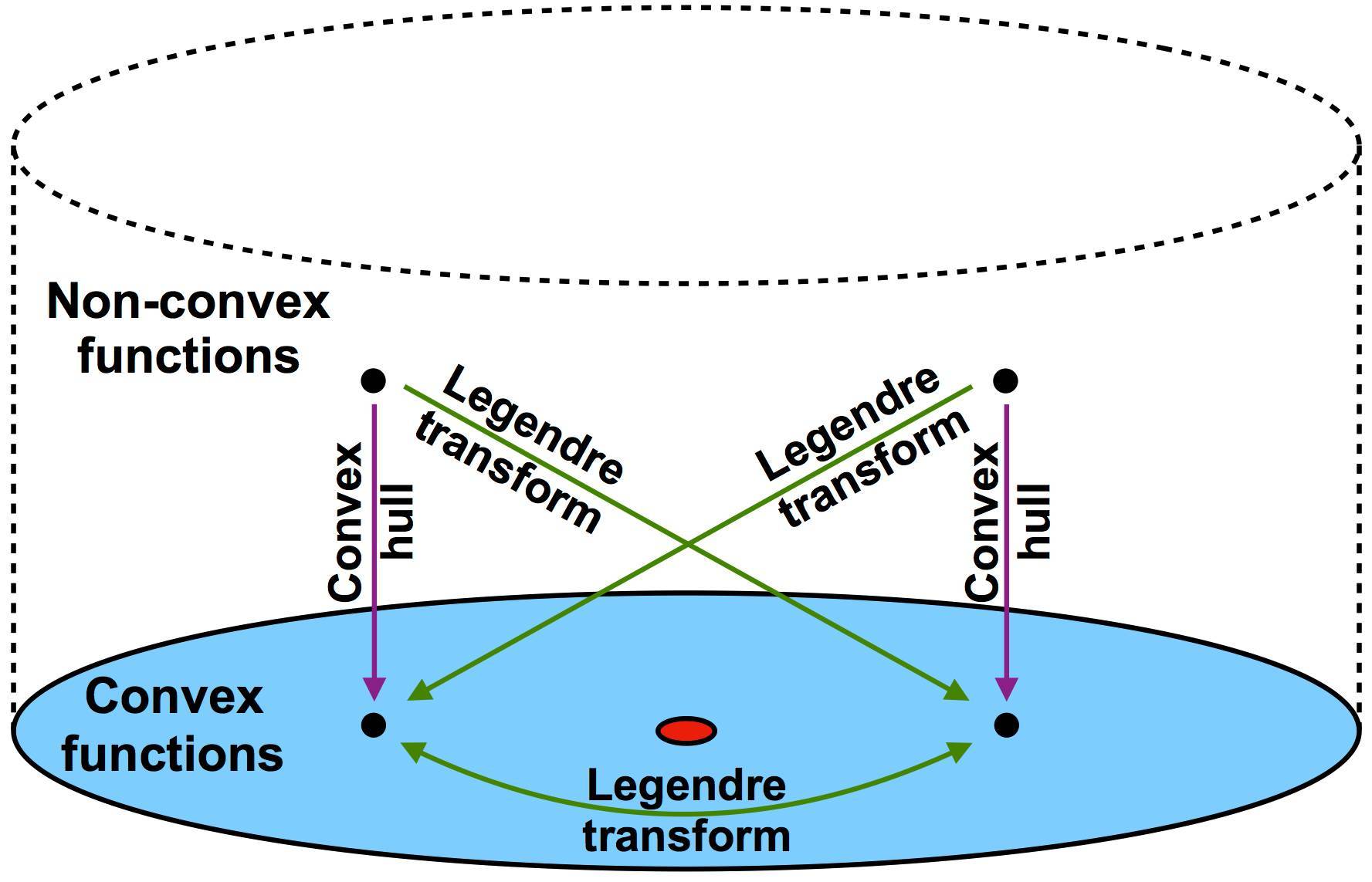
- Fenchel 共轭是对 Legendre 变换的扩展,不再局限于凸、可导函数
- Fenchel 共轭可类似 Legendre 理解,但是适用范围更广
- 对凸函数 Fenchel 共轭的共轭即为原函数,对非凸函数 Fenchel 共轭得到原函数凸包
- 用罗尔中值定理描述极值、导数关系:兼容 Legendre 变换中导数支撑面
- 非凸函数线性外包络是凸函数
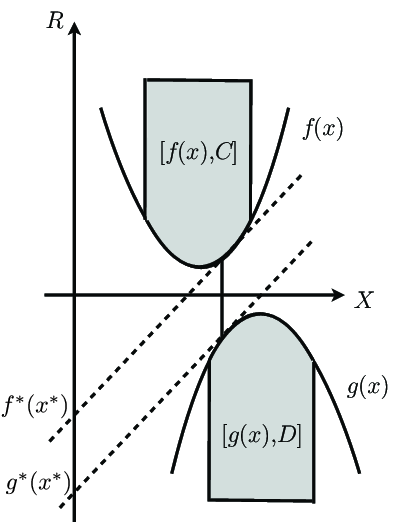
Fenchel-Young不等式
证明
按积分理解,仅$p$为$x$共轭时取等号
Fenchel Conjugate 推导 Lagrange Duality
原问题 Prime
约束条件 $g(x) \leq 0$ 扰动函数化、求 Fenchel 共轭
记 $\lambda = -y$,并将 $y=-\lambda$ 带入 $-p^{*}(y)$ 中得到
- $\lambda = -y$
将 $\inf_{x \in X, g(x) \leq u}$ 外提,并考虑到约束 $g(x) \leq u$(即 $u \geq g(x)$),则
考虑 Fenchel 不等式
则可得 Lagrange 对偶 Prime、Dual 最优关系
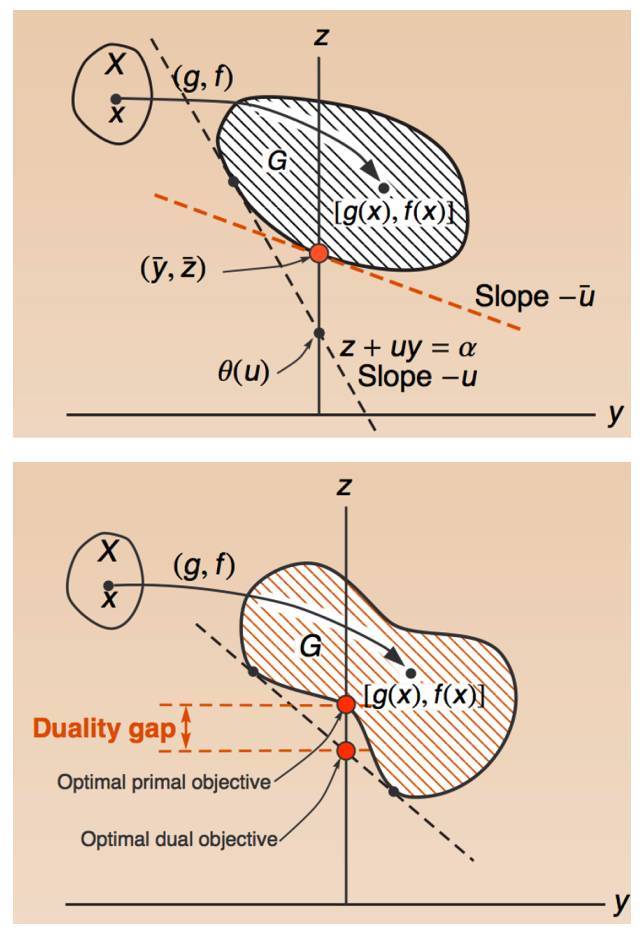
Lagrange Duality 推导 Fenchel 对偶
- Fenchel 对偶可以视为 Lagrange 对偶的应用
原问题、等价问题
对上式取 Lagrange 对偶 $L(u)$、等价得到
- Fenchel 对偶:寻找截距差值最大的平行切线

